L’une des raisons du passage à la CR-10, c’était de pouvoir imprimer des objets en TPU pour mes multirotors. Le Eachine Tyro99 est très bien pour débuter, mais la châssis ne laisse pas vraiment d’espace pour fixer correctement une caméra HD (une Runcam 2 dans mon cas). J’ai donc modélisé un support parfaitement adapté.
Pour commencer, un petit mot sur l’impression du TPU. (suite…)
Toujours dans la série « Impression 3D », après avoir testé et optimisé ma CR-10, imprimé les décorations de Noël, il était temps de la soumettre à des modèles plus complexes pour voir quelle qualité elle peut atteindre.
Il y a 5 ans, après de longues optimisations mais surtout un gros travail de « post-production » (ponçage, primaire de lissage, reponçage, peinture, vernis…), j’avais réussi à obtenir un très bon résultat.
Cette fois-ci, je n’ai pas fait autant d’efforts (suite…)
Ça faisait longtemps que je n’avais pas reparlé d’impression 3D, bien que j’avais créé ce blog au départ pour documenter la fabrication d’une Mendel90 Sturdy ! Donc après la CNC, les robots, les drones et autres bricoles, nous y revoilà !
Depuis que je me suis mis au pilotage de qwads, les besoins en impression 3D refont surface, et en particulier l’impression de filaments flexibles : idéals pour absorber les chocs et les vibrations. Malheureusement, après une semaine de tentatives infructueuses et diverses modifications sur ma Mendel90, je n’ai rien obtenu de suffisamment satisfaisant, je me suis donc laissé tenter par un remplacement de ma bonne vielle imprimante 🙂
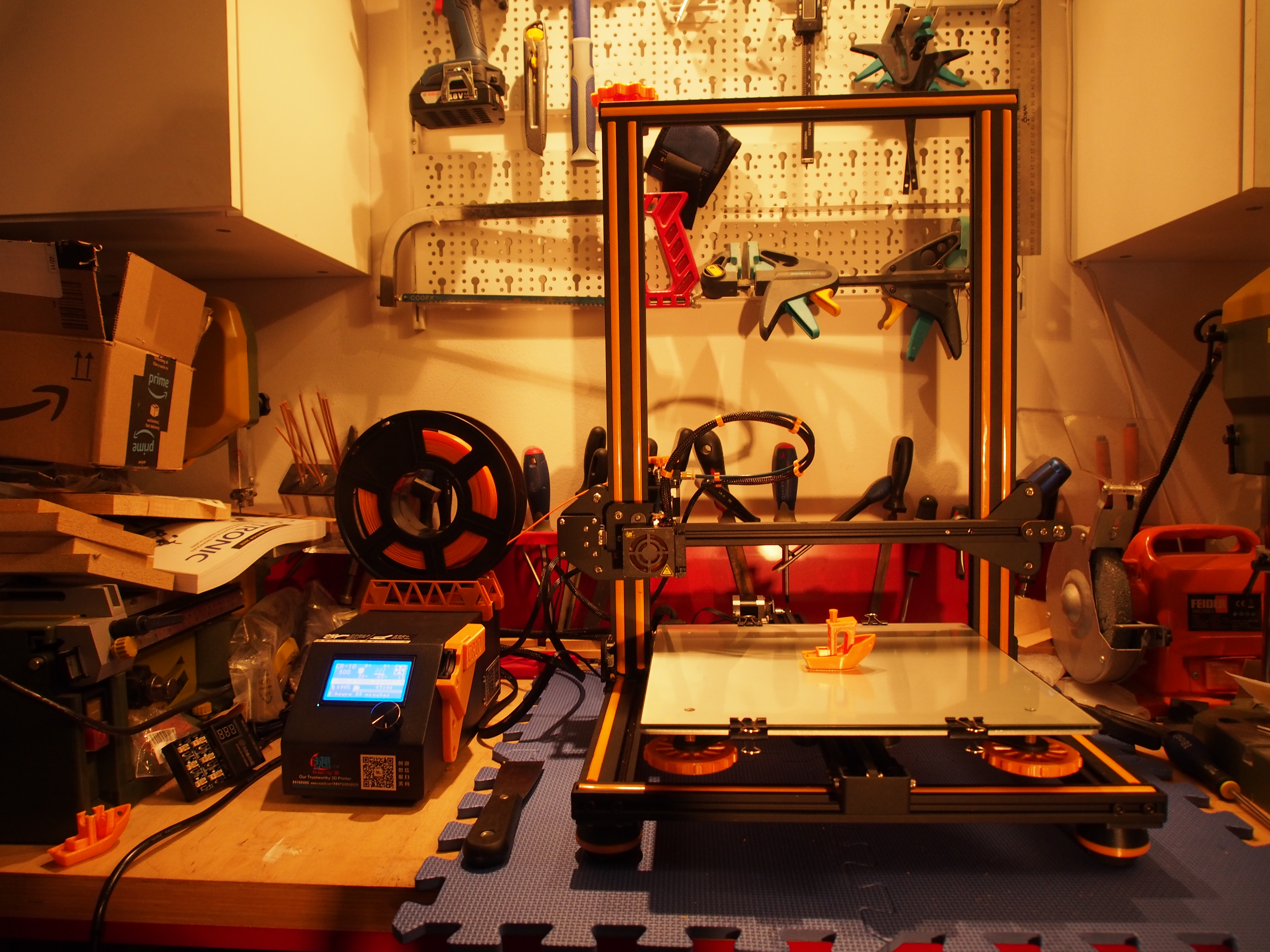
Il a fallu se mettre un peu à jour, et le modèle qui a le vent en poupe depuis un peu plus d’un an, c’est la CR-10 de Creality3D. Une communauté énorme s’est constituée autour, plein d’améliorations sont disponibles, les pièces de rechange sont faciles à trouver, et le firmware a été mis à disposition (c’est du Marlin, comme pour la Mendel90). D’autres modèles (Tevo Tornado, Alfawise U20…), très similaires ont vu le jour, parfois un peu moins chers, mais j’ai préféré privilégier un modèle bien installé dans l’univers de l’impression 3D. Côté prix, je l’ai payée 379€… chez Amazon ! En général, on achète ces imprimantes en Chine. J’ai été livré en 24 heures, et j’ai une vraie garantie. En bonus, si vous suivez ce lien, il s’agit du vendeur officiel ! (il y a de nombreux clones, pas forcément moins chers). (suite…)
Il faut savoir que le PLA (et davantage encore le TPU) sont très sensibles aux conditions de stockage, et en particulier à l’humidité. C’est pour cela qu’elles sont en général livrées sous vide et avec un sachet d’absorbeur d’humidité. J’ai même lu des articles où il était recommandé de laisser « sécher » au four des bobines n’ayant pas été utilisées depuis un moment, pour évacuer le surplus d’humidité et limiter les dégâts. Dans la mesure du possible, on évitera également de les stocker à la lumière.
Au total je dois avoir en 10 et 15 bobines de filament : couleurs différentes, opaques/translucides, PLA, TPU, bois… Mais je n’imprime pas en permanence et je garde ces stocks très longtemps avant de les écouler.
Dans le précédent article j’ai décrit comment j’avais remplacé tout l’électronique de ma petite CNC pour régler des problèmes de fiabilité/stabilité.
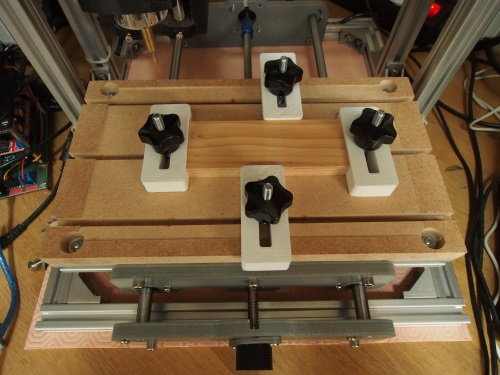
Cette fois-ci, on va s’attacher à régler 4 autres problèmes :
La machine vibre quand même beaucoup (elle est posée directement sur mon plan de travail en chêne). Ca peut avoir un impact sur la précision, mais c’est surtout le bruit qui me gène.
Le plan de travail de la machine en aluminium n’est pas tout à fait plan, j’ai constaté 1 mm d’écart entre le bord gauche et le bord droit. Lors de gravure déco sur bois, ce n’est pas très gênant, mais pour graver des PCB, où la couche de cuivre à retirer est très fine, ce n’est pas acceptable.
La machine ne peux pas percer ou fraiser complètement la matière sous risque d’endommager la fraise et le plan de travail en aluminium.
Le système de fixation vendu avec la machine est simplement une horreur à utiliser.
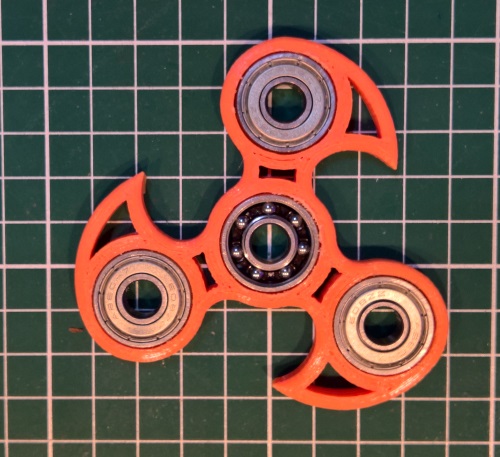
Allé, on n’échappera pas à la tendance du moment : le hand spinner (ou fidget spinner)
Bon, et c’est aussi l’occasion de redémarrer l’imprimante 3D qui commençait sérieusement à prendre la poussière après plus d’un an de repos. J’espère retrouver un peu de temps pour avancer sur des projets plus sympa rapidement (notamment le projet R.I.P.E.R.).
En attendant, voici 2 hand spinners, sortis tout droit du Thingiverse ! Le premier à 3 branches (le modèle par ici) :
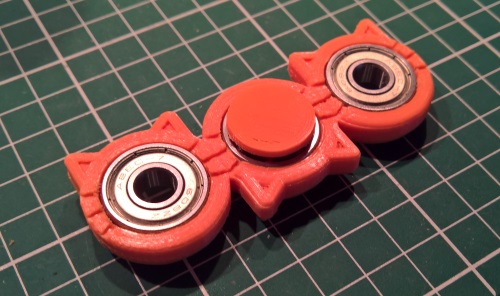
Et maintenant voici le Cat Spinner 😉 (modèle par ici) :
On finit avec une petite vidéo de tout ça en action 🙂
En bonus, une petite astuce : les roulements à billes sont gavés d’huile ou autres graisses qui génèrent beaucoup de frottements et qui empêchent de longues rotations. Si les roulements sont vieux, ils peuvent être encrassés. Pour obtenir des roulements efficaces, il suffit de les laisser tremper quelques minutes dans un dissolvant (alcool, acétone…) qui virera le gras et les saletés, puis les rincer et bien les sécher. Ils devraient maintenant beaucoup mieux tourner ! Attention tout de même, ils s’useront plus rapidement s’ils tournent à sec, donc ne pas hésiter à ajouter une goutte d’huile (ce que je n’ai pas fait…).
Après cette parenthèse culinaire, revenons à la technique. Dans un précédent article , je présentais l’étage des batteries du robot, passons à l’étage de gestion de l’alimentation.
Ce bloc va être chargé d’apporter l’énergie aux différents éléments du robots :
5V pour l’électronique de bas niveau et pour le cerveau (mini PC)
7.2V pour les moteurs à courant continu
6V pour les servomoteurs
J’utilise 3 modules :
Pour l’électronique, l’alimentation DFRobot DFR0205 3.3-25V 25W convertira les 7.2V de la première batterie (ou de l’alimention externe) en 5V
Les moteurs seront alimentés par la seconde batterie et pilotés par le contrôleur SaberTooth 2x5A.
Pour les servomoteurs, le module d’alimentation Seeed Studio 1.25-35V 3A convertira les 7.2V de la première batterie (ou de l’alimention externe) en 6V
Lorsque que le robot sera alimenté en 12V (alim externe), il faudra le détecter parce que les moteurs ne pourront pas encaisser les 12V en continu (ou prévoir une alim externe de 9V) :
These motors are intended for use at 6 V. In general, these kinds of motors can run at voltages above and below this nominal voltage, so they should comfortably operate in the 3 – 9 V range, though they can begin rotating at voltages as low as 1 V. Higher voltages could start negatively affecting the life of the motor.
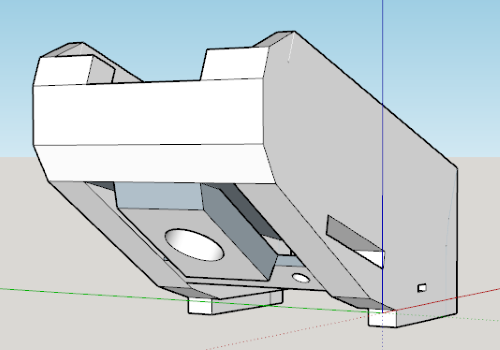
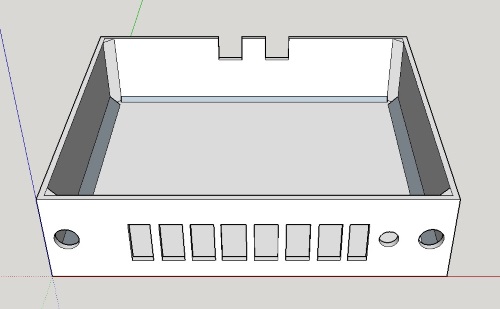
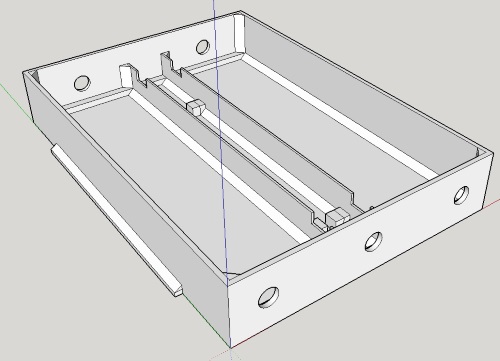
Voici le caisson prévu pour ces éléments :
Les 2 trous sur les extérieurs accueilleront les fiches d’entrée pour les alimentations (électronique/moteurs). Le petit trou accueillera un double switch (pour activer/désactiver les 2 sources de courant en même temps).
Comme cet étage sera « suspendu » dans le châssis par des fixations latérales, j’ai collé 2 plaques d’aluminium sur les côtés pour renforcer la structure et éviter un décollage des couches de plastiques.
La grande ouverture rectangulaire est destinée au connecteur 14 pins qui permettra la connexion avec le corps du robot.
De gauche à droite, la description de chaque pin :
+5V électronique bas niveau
0V
+5V électronique haut niveau (mini PC, hub USB)
0V
+6V pour les servomoteurs
0V
Néant
Pont diviseur de tension sur batterie 1 (surveillance de la charge et détection alim externe)
Pont diviseur de tension sur batterie 2 (surveillance de la charge et détection alim externe)
Pilotage des moteurs (connexion série Arduino Mega –> SaberTooth)
Encodeur A moteur 1 vers Arduino Mega
Encodeur B moteur 1 vers Arduino Mega
Encodeur A moteur 2 vers Arduino Mega
Encodeur B moteur 2 vers Arduino Mega
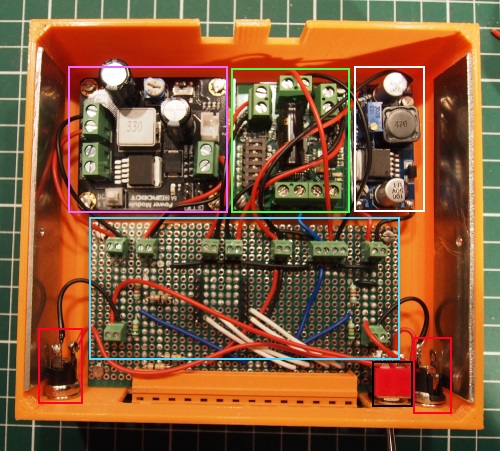
La photo ci-dessous montre l’agencement des composants :
Rose : régulateur 5V
Vert : contrôleur des moteurs
Blanc : régulateur 6V
Bleu : carte d’interface entre les différents éléments
Rouge : fiches jack d’entrée pour l’alimentation en provenance des batteries/alim externe
Noir : double switch
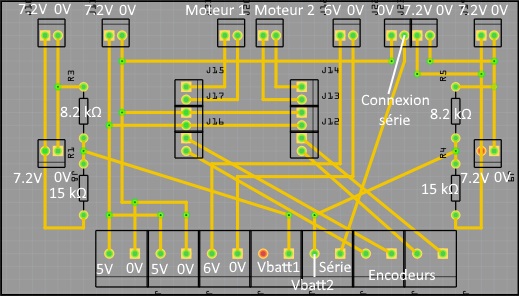
Le schéma ci-dessous permet de mieux visualiser les connexions :
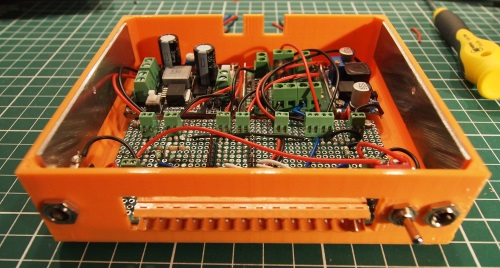
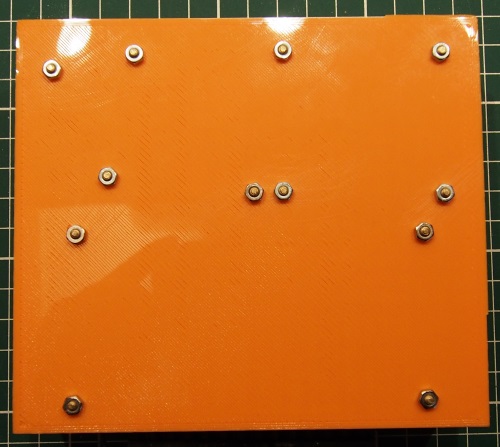
Vue du dessous : les composants sont fixés sur des entretoises.
Une batterie de 7.2V/5Ah sera dédiée à l’alimentation des moteurs CC et servomoteurs, l’autre alimentera tout l’électronique du robot. Il pourra fonctionner au choix, sur batteries ou sur alimentation secteur (via régulation 12V). La bascule se fera automatiquement.
On pourra recharger les batteries du robot sans les sortir du chassis, via 2 connecteurs jack.
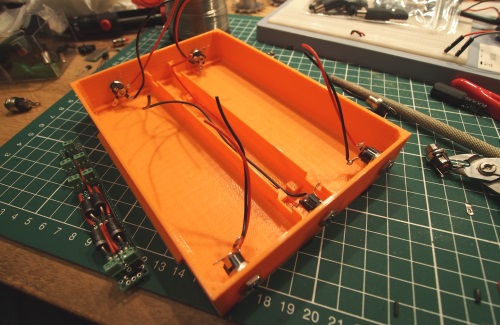
Voici le modèle 3D :
Et la sortie d’impression :
On commence par installer les connecteurs jack femelles :
Les 2 à l’avant permettront la recharge des batteries
Les 2 sur les côtés à l’arrière permettront d’alimenter l’étage supérieur (contrôle des moteurs et alimentation du robot)
Le connecteur du milieu est l’entrée pour une alimentation fixe de l’ensemble du robot
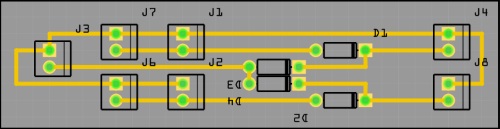
Le circuit électronique utilise le principe de commutation par diodes, décrit ici. Quand l’alimentation fixe du robot est coupée (12V), les batteries prennent automatiquement le relais (7.2V). Voici le schéma de la carte :
Les Jx sont des borniers, Cx des diodes Schottky. J3 est l’arrivée de l’alimentation fixe en 12V. J7 et J8 sont connectés aux prises jack de rechargement des batteries. Les borniers J1 et J2 permettent de raccorder les 2 batteries. Enfin, J4 et J8 sont les sorties vers les connecteurs jack qui alimenteront l’électronique et les moteurs du robot.
Après installation des 2 batteries :
J’ai également imprimé un couvercle, essentiellement pour des raisons esthétiques, en gardant une ouverture pour l’évacuation de la chaleur.
Le bloc prendra ensuite place dans le châssis.
J’espère que le diamètre des fils sera suffisant pour le courant qui circulera. J’ai été contraint d’utiliser des borniers plus petits que prévu initialement pour des raisons de place. On verra bien 🙂
Après quelques mois passés à bosser sur un gros projet, je m’offre une petite pause de fun pour un petit BB-8 fait maison, parce qu’il est vraiment trop mignon 😉 (vidéo disponible à la fin de l’article).
A la base, je voulais juste faire une une figurine et puis je me suis dit que ça serait sympa de l’animer un peu. Alors il ne se déplace pas, mais il tourne la tête, émet des sons et détecte les obstacles devant lui : un simple passage de la main devant lui déclenchera différentes animations.
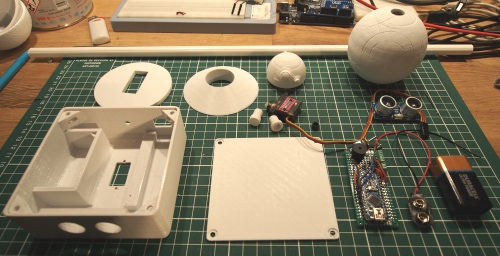
Ci-dessous, l’ensemble des éléments utilisés (électronique, pièces imprimées, capteur ultrasons, servomoteur…). Le modèle 3D n’est pas de moi, il vient d’ici. J’ai fait des trous dans le corps pour pouvoir passer l’axe de la tête et imprimé des joints pour assembler le tout (+ le support).
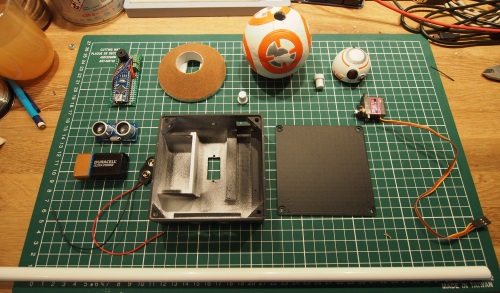
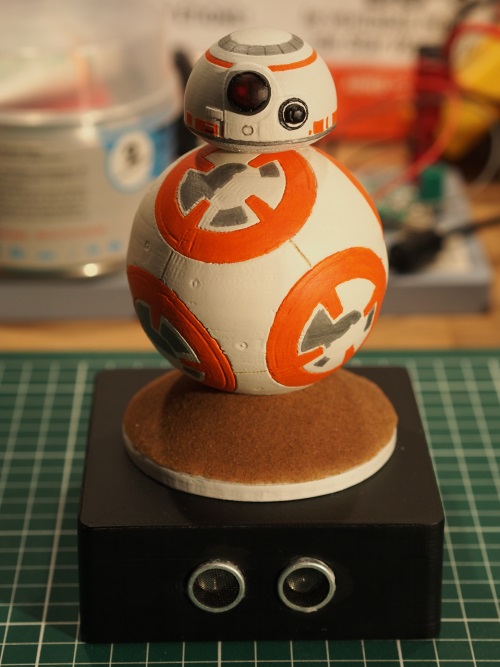
Après ponçage, enduit, peinture et vernis, il ne reste plus qu’à assembler le tout.
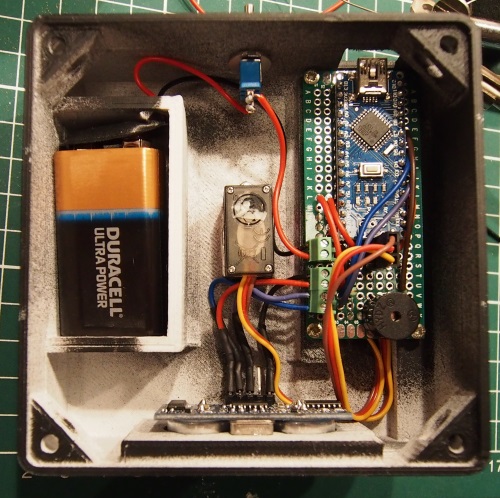
L’image suivante représente le « cerveau » de BB-8 : un simple Arduino Nano, un buzzer et 3 borniers à visser (alimentation et capteur ultrasons).
Le code est disponible ici. C’est pas super propre mais bon, ça fait l’affaire. J’ai eu de petits soucis d’incompatibilité entre différentes librairies car elles utilisaient les mêmes interrupts : Servo, NewPing, Tone (ou même NewTone pour éviter le conflit avec NewPing). Au final, je n’utilise aucune librairie pour piloter le buzzer).
Vue du boitier une fois tous les composants en place :
Le servomoteur est fixé au centre du boitier :
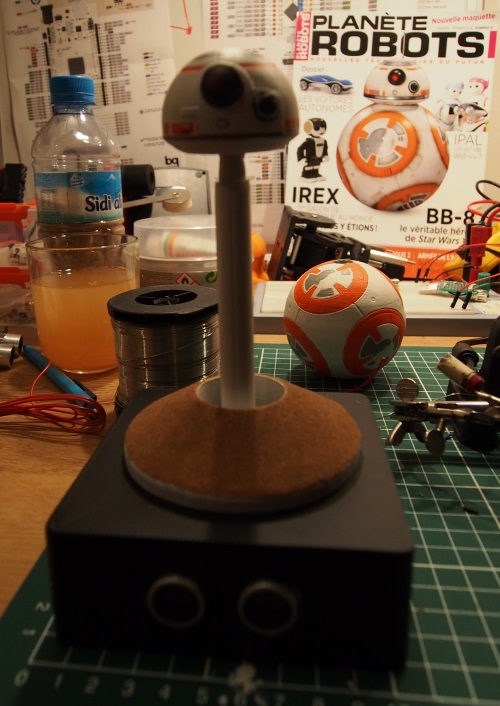
Pour prolonger l’axe du servomoteur, j’ai utilisé un tube (qui remontera jusqu’à la tête) et imprimé 2 joints qui s’emboîtent dans le tube de PVC : le premier a un emplacement prévu pour intégrer le connecteur à la tête du servomoteur (en noir, que j’ai découpé d’un support vendu avec le servo) et le second qui permet de faire la jonction avec la tête).
Au passage, le socle au dessus du servo est constitué de 2 pièces : la première permet de surélever le support au dessus des vis du servo et le second est un cône qui donnera l’illusion d’une dune (le sable a été saupoudré sur une couche de colle à bois) parce qu’on rencontre BB-8 dans le désert ;).
Aperçu du système de rotation de la tête :
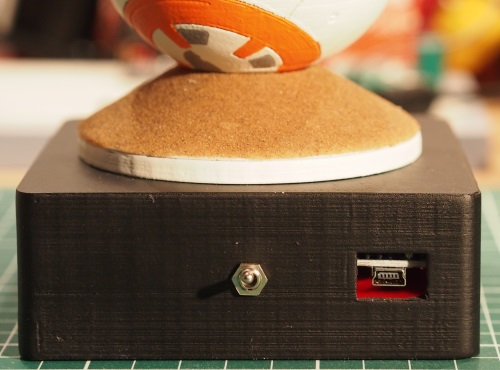
A l’arrière : un interrupteur et un connecteur USB (le robot peut fonctionner sur USB ou sur pile, au choix) :
Et voilà !
Pour finir, une démonstration de notre petit BB-8 en vidéo 🙂
Tous les fichiers sont disponibles ici (modèles Sketchup, fichiers STL et code pour le Arduino Nano). Les fichiers STL du robot en lui-même sont à récupérer sur Thingiverse comme indiqué plus haut.