Dans cet article, on va présenter la marche à suivre pour construire de A à Z son propre quad, de la phase de conception jusqu’à son premier vol.

Après avoir découvert le FPV avec un nano drone, j’ai eu envie de passer à la vitesse supérieure en achetant un kit pour fabriquer mon premier multirotor 5 pouces, un Tyro99 de chez Eachine :

Le montage de ce quad m’a beaucoup appris et il est parfait pour débuter (j’ai quand même changé la caméra et les hélices). Maintenant, j’ai envie de concevoir mon propre quad : choisir les composants un par un selon mes besoins.
Le Net foisonne de tutos pour les débutants, on trouve plein d’articles et de vidéos sur des tests de produits, des vidéos de montage etc. Mais je n’ai pas trouvé de guide complet en français sur le sujet, j’ai dû fouiller un peu partout pour trouver les réponses à toutes mes questions. C’est l’ensemble de cette démarche que va présenter cet article, en se basant sur mon build à titre d’illustration (en bleu dans la suite de l’article), mais en essayant de rester générique.
Si vous avez déjà sélectionné ou acheté vos composants, n’hésitez pas à sauter les premières parties pour aller directement sur la préparation ou la réalisation du montage, il y aura certainement de bonnes astuces à prendre 🙂
Disclamer 1 : je suis tombé dans ce hobby il y a quelques mois seulement, ça ne sera certainement pas le guide parfait, mais c’est en tout cas le cheminement que j’ai suivi, n’hésitez pas à apporter vos remarques 🙂
Disclamer 2 : ce guide s’adresse à un public de niveau intermédiaire, mon premier article sur les drones pourra aider les plus débutants à comprendre ce qui va se raconter ici, en particulier au niveau du vocabulaire.
Disclamer 3 : ce guide a été rédigé début 2019 : notre hobby évolue très vite, et même si j’essaierai de le mettre à jour (en mettant en valeur les modifications importantes sous ce message), gardez ce détail en tête 🙂
Dernière mise à jour : 16/04/2019
Sommaire
- Le châssis (frame)
- Quels moteurs ?
- Les hélices
- La PDB
- Les ESCs
- La carte de vol (FC, Flight Controller)
- L’émetteur vidéo (VTX)
- La caméra FPV
- Le récepteur radio (RX)
- Les lipos
- Les accessoires supplémentaires
- Analyse de l’ensemble des composants
- Diagramme de câblage
- Agencement des composants
- Précautions à prendre
D) Le montage, tips, étanchéité, pièges à éviter
- Prérequis
- Bonnes pratiques, astuces et pièges à éviter
- Préparation du châssis
- Montage 1/2
- Vérifications
- Configuration
- Étanchéification
- Montage 2/2 (Finalisation)
- Photos
F) Le Maiden
A) Par où commencer ?
1. Pour quoi faire ?
La première question à se poser est tout bêtement : qu’est-ce que je veux faire avec ce nouveau quad ? Voici quelques exemples :
- Voler en intérieur (gymnase, entrepôt…) ? Il faudra rester sur un châssis compact (aux alentours de 100 mm de diagonale de moteur à moteur, voire moins).
- Voler en extérieur ? La taille n’est plus une contrainte, les châssis pour hélices de 5 pouces sont le standard le plus répandu, mais absolument pas une obligation, on voit de plus en plus de 3″.
- Faire de la course ? On privilégiera une config légère, on cherchera à optimiser la taille de la lipo et la vitesse (le format 5″ est la norme).
- Faire du freestyle ? Le poids n’est plus un problème (sans faire une brique non plus), on voudra sans doute un moteur avec pas mal de couple sur la première partie des gaz, pour bien s’éjecter, tout en étant précis et « smooth »
- Voler tranquillement ? on cherchera une combinaison moteurs/hélices avec un bon rendement
- Voler sans s’arrêter à l’atelier entre chaque crash, surtout si l’on début ? on sélectionnera un châssis et des composants robustes (mais pas trop chers 😉 )
- Ne pas galérer dans le montage ? on privilégiera une châssis spacieux.
- Ne pas se ruiner ? Il va falloir trouver le meilleur compromis qualité/prix et savoir faire des concessions 😉
- Faire du long range ? On sélectionnera un RX adapté, on visera une faible consommation (importance du choix des moteurs et hélices), peut-être des lipos 6S, on pourra prévoir un GPS pour le retrouver plus facilement en cas de perte etc.
- …
Mon besoin : avoir une configuration de qualité et robuste pour progresser en freestyle. Sans tomber dans l’excès : je suis loin d’être un bon pilote, je vais forcément casser, il faudra remplacer et passer à la caisse. Je n’ai pas envie de réinvestir dans de nouvelles lipos pour l’instant, je garderai donc celles de mon Tyro99 : 4S 1500 mAh 75-100C. J’ai plein de lentilles de remplacement pour Runcam Swift 2 et j’aimerais disposer du retour audio sur mes lunettes. Je resterai donc sur ce modèle de caméra.
Ça cadre déjà bien les choses et nous donne un bon point de départ, on peut démarrer !
2. Où faire son shopping ?
Pour l’électronique, j’ai pris l’habitude de très souvent commander en Chine, en particulier sur Banggood, parfois sur Ebay. Effectivement, Banggood et autres Gearbest ont une offre énorme, souvent à bon prix.
Cependant, pour les drones, j’ai très vite modifié mes habitudes ! Alors oui, je continue à commander sur Banggood, ce qui n’est dispo que là bas, et les petites bricoles (LEDs, vis, entretoises, bouts de sticks, lentilles, connecteurs d’antennes…).
Pour le reste, j’achète au maximum sur les shops français, et ce pour plusieurs raisons :
- Je suis bien content d’avoir des enseignes dédiées au hobby en France, il faut donc les soutenir pour qu’elles perdurent
- On a une vraie garantie (quand j’ai un souci avec un truc de chez Banggood, c’est poubelle)
- Il y a souvent des gens compétents que l’on peut contacter pour avoir des renseignements
- On est livré en seulement un jour ou 2, aussi fort qu’Amazon. Les 3-4 semaines de Banggood sont vraiment contraignantes quand on ne veut pas passer 3 mois à monter un quad 😉
- Et contrairement à ce qu’on pourrait penser, les prix ne sont pas beaucoup plus élevés ! Voir parfois pratiquement identiques, sur les lipos ou certains moteurs par exemple. Et quand c’est plus cher, l’écart est souvent justifié par les points précédents (des fois c’est tout de même abusé, comme les EV200 qui sont plus de 50% plus chères en France 😉 )
Je commande principalement chez 2 enseignes avec lesquelles je n’ai jamais eu le moindre problème :
- Drone-Fpv-Racer (livraison en 24h gratuite à partir de 70€, en 48h dès 50€)
- StudioSport (livraison en 48h dès 50€ et un magasin physique à Boulogne)
Mais vous faites bien comme vous voulez 🙂
B) Le choix des composants
1. Le châssis (frame)

C’est notre point d’entrée. Une fois le besoin identifié, on peut partir à la chasse de la frame de nos rêves.
On a nos critères : poids, taille, prix, design, type d’utilisation… Pour les quads, on trouvera de nombreuses formes de châssis, quelques exemples :
- « True-X » : les bras sont en croix à angle droit, les moteurs sont espacés de manière uniforme. C’est une configuration polyvalente
- « Wide-X » : les bras ont la forme d’un X écrasé, ou étiré horizontalement, les moteurs de chaque côté sont rapprochés. Ils sont répandus pour le freestyle.
- « Stretch-X » : Là, les bras ont la forme d’un X étiré verticalement : les moteurs avant sont plus éloignés des moteurs arrière. Cette configuration est plus orientée racing.
- En « H » etc…
Plus d’infos :
L’excellent tuto de We Are FPV : Châssis / Frame, comment choisir ?! | Astuces, Guide et Conseils d’achat
All About Multirotor Drone FPV Frames
A noter que les châssis ayant des bras séparés sont plus faciles à réparer que les châssis « unibody ». Et ce sont souvent les bras que l’on casse.
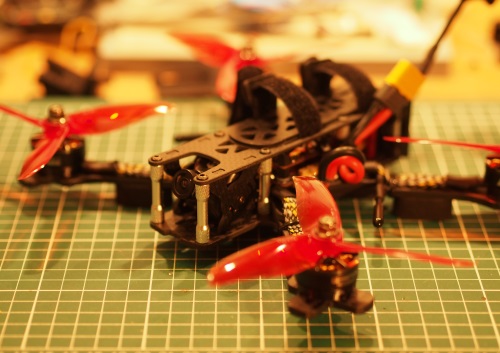
Pour mon build
Je sais que le châssis, c’est ce qui risque de casser en premier. Je ne veux donc pas me ruiner dans une frame (surtout que j’en prendrai 2 pour avoir du spare). Néanmoins, je n’ai pas envie de prendre un clone chinois, mais de soutenir les marques qui font avancer notre hobby. Aujourd’hui, 2 châssis répondent à ce besoin (prix contenu mais de marque) : le CL1 de Rotor Riot et la SourceOne de TBS (35€). J’ai eu un coup de cœur pour la TBS SourceOne en v0.2. Elle paraît robuste, en Wide-X, elle est spacieuse, idéale pour un premier build custom, le support caméra intégré est un vrai plus et pour couronner le tout, elle est sous licence OpenSource.
2. Quels moteurs ?

Maintenant qu’on a le châssis, on sait quel est le diamètre des hélices qu’on utilisera. Je pique le tableau suivant à Oscar Liang. Attention, ce tableau donne un ordre d’idée et ne dispense pas de bien regarder les specs de la frame qui indiqueront de manière plus sûre le diamètre des hélices à utiliser. La taille du châssis indiquée ci-dessous correspond à la distance entre 2 moteurs dans des coins opposés (donc en diagonale).
| Taille du châssis | Diamètre des hélices | Taille des moteurs | KV (pour du 4S) |
| 150mm ou moins | 3″ ou moins | 1105 -1306 ou plus petit | 3000KV ou plus |
| 180mm | 4″ | 1806 | 2600KV – 3000KV |
| 210mm | 5″ | 2204-2208, 2306 | 2300KV-2600KV |
| 250mm | 6″ | 2204-2208, 2306 | 2000KV-2300KV |
| 350mm | 7″ | 2208 | 1600KV |
| 450mm | 8″, 9″, 10″ ou plus | 2212 ou plus gros | 1000KV ou moins |
A partir de là, on connait la taille des moteurs à cibler ainsi que la plage de KV recommandée.
A noter que les plages de KV recommandées dans ce tableau et les suivants sont données pour des lipos 4S (voire 5S) qui ont longtemps été le standard. Aujourd’hui, les configs à base de 6S commencent petit à petit à se démocratiser, et il faudra adapter les KV en fonction (pour du 6S, on se dirigera vers des moteurs d’environ 1600-2000KV).
Sans rentrer dans le détail du 4S vs 6S, les lipos 6S sont souvent un peu plus chères mais subissent moins de chute de tension lors de gros coups de gaz.
Pour rappel, un moteur est décrit en fonction de sa taille et de sa vitesse de rotation pour 1V. Par exemple, un moteur libellé « 2206 2600KV » peut tourner à 2600 tours/min par volt (soit pour une lipo 4S, à environ 16V : 16 x 2600 = 41600 tr/min). Les moteurs brushless ne pouvant généralement pas dépasser les 50 000 ou 60 000 tr/min, sauf exceptions. Plus le KV est élevé, plus le moteur pourra tourner vite. Au contraire, plus le KV est bas, et plus le moteur aura de couple.
Pour revenir à la taille, elle est la concaténation de 2 nombres : le diamètre du stator et la hauteur des aimants (en mm). Pour reprendre notre exemple précédent, un moteur 2206 contiendra un stator de 22 mm de diamètre et des aimants de 6 mm de hauteur. Plus un moteur est gros, plus il a de couple (mais son poids augmente…).
A noter que souvent, le concepteur d’une frame fournit des exemples de configuration moteurs/hélices adaptés.
Un autre tableau, en complément du précédent (piqué chez Dronenodes.com) :
|
Taille des hélices |
Diamètre stator recommandé |
Hauteur des aimants recommandée |
KV recommandés |
Dimensionnement des ESC recommandé |
|---|---|---|---|---|
|
2″ |
11 |
03 – 06 |
4000 – 8000 |
6 – 12A |
|
3″ |
13-14 |
06 – 07 |
3000 – 4000 |
12 – 20A |
|
4″ |
13-22 (selon le châssis) |
04 – 07 |
2400 – 2900 |
20A |
|
5″ |
22-23 |
05 – 07 |
2200 – 2800 |
20 – 35A |
|
6″ |
22-23 |
06-08 |
2200 – 2800 |
30 – 40A |
|
7″ |
300mm+ |
06+ |
1800 – 2300 |
30A + |
Toutes ces informations en poche, on peut repartir à la recherche de notre moteur idéal. On fera un saut sur quelques shops en ligne pour voir ce qui se fait dans nos critères avant d’aller écumer les tests de nos sites favoris (WeAreFpv, CultureFPV, OscarLiang, la chaîne de Joshua Bardwell et bien d’autres) pour avoir de bons conseils.
En bonus, bien lire les commentaires postés par les utilisateurs sur ces produits et ne pas hésiter à regarder les configurations d’autres pilotes ayant le même châssis, sur DroneBuilds de WeAreFPV ou RotorBuilds.
Ces quelques conseils sont valables pour tous les composants de notre build.
Pour mon build
Mon choix s’est porté sur des T-Motor F40 Pro II 2400. Ce sont des 2306. J’ai hésité avec des 2207 qui ont le vent en poupe en ce moment, mais j’ai été plus inspiré par les vidéos de vols en 2306. De plus, on les retrouve sur de nombreux builds et les tests et commentaires sont très positifs. Bon, le prix pique un peu (25€/pièce), je me suis peut-être un peu trop lâché vu mon niveau… Et j’en ai pris 2 en spare.
Pour aller plus loin
Discussion sur le forum de We Are FPV
HOW TO CHOOSE MOTOR FOR RACING DRONE & QUADCOPTER par Oscar Liang
Comment choisir moteurs et hélices (fpv-passion)
Calculateur (payant)
3. Les hélices

Un mot rapide concernant les hélices, vu qu’on a tout ce qu’il faut pour les choisir. 3 nombres caractérisent une hélice :
- Son diamètre , exprimé en pouces
- Le pas de l’hélice, exprimé en degrés : plus il est élevé, plus le quad pourra donner de fortes accélérations. Par contre, ça nécessite plus de couple au niveau des moteurs et consomme donc plus de courant.
- Le nombre de pales. Là aussi, plus on aura de pales plus la consommation en courant sera importante, mais on aura une meilleure « accroche » ce qui limitera l’effet « dérapage ». Les tripales sont sans doute les plus répandues, présentant un bon compromis.
Ça vaut le coup d’en essayer différents modèles, certaines se mariant plus ou moins bien à l’ensemble des autres composants. Des pilotes ont réglé des problèmes de vibrations simplement en changeant d’hélices !
Pour mon build
Je me suis pris un petit assortiment pour faire des essais :
- Hélices tripales DALprop CYCLONE T5046C
- Hélices tripales DALprop CYCLONE T5045C
- Hélices HQProp DP 5X4.3X3V1S
- Hélices Azure Power 5045 V2 tripale
- Hélices Avan Flow 5×4.3×3
Un petit mix entre un pas de 43 et 46. Les Cyclone sont une référence, les HQProp sont celles indiquées dans la doc des moteurs et j’avais avais adoré les Azure Power sur mon Tyro99. J’aime bien le profilé des Avan FLow, qui ressemble un peu aux Azure Power.
Pour aller plus loin
L’importance du choix du combo hélices et moteurs pour éviter les vibrations ! (We Are FPV)
4. La PDB
C’est l’élément responsable de distribuer l’alimentation de la lipo à l’ensemble des composants du quad. Elle embarque souvent un BEC 5V et 12V, pour alimenter les différents périphériques (VTX, caméra, RX, LEDs…), ainsi qu’un capteur de courant.
Il est fréquent aujourd’hui que cette fonction soit prise en charge par la FC. On trouve même des carte AIO (All-In-One) qui embarquent FC, ESC, PDB, OSD.
Pour mon build, je n’ai pas besoin de PDB. C’est le couple ESCs/FC qui s’acquittera de cette tâche.
5. Les ESCs

Ce sont eux qui pilotent les moteurs. Comme nous allons le voir, le choix des ESCs est intimement lié à celui des moteurs et de la FC.
Séparés ou 4-en-1 ?
Il fut un temps où la seule option était d’avoir un module ESC pour chaque moteur, positionné sur chaque bras. Depuis quelques temps une alternative est disponible, les ESC 4-en-1 : les 4 ESCs sont réunis sur une même carte, qui vient se placer dans le châssis, sous la FC.
Il n’y a pas de solution meilleure que l’autre, chacun fera selon ses contraintes et ses envies. Avec des ESCs séparés, quand on en casse un, on a un seul ESC à changer, la réparation est beaucoup moins coûteuse. Avec un 4-en-1, il faut remplacer les 4 à chaque fois. Par contre, étant placés dans le châssis, il sont mieux protégés et facilitent le câblage et le montage.
Le firmware
Comme les FC, les ESC dépendent également d’un micrologiciel. Quelques exemples parmi les plus répandus : BLHeli_S, BLHeli_32, KISS…
Le protocole de communication avec la FC
Ces dernières années, il y a eu beaucoup d’agitation autour des protocoles utilisés par les ESCs. Jusqu’à récemment, les protocoles des ESCs utilisaient des signaux analogiques (inspirés de PWM), parmi ces protocoles on trouve les différentes versions de OneShot et MultiShot.
Récemment, plusieurs déclinaisons d’un nouveau protocole DShot (150, 300, 600, 1200), cette fois-ci digital, ont vu progressivement le jour. Plus le nombre est élevé, plus le protocole est rapide. Pour profiter du DShot 1200, il faut du matériel très récent et un firmware sous BLHeli_32. Le DShot 600 est maintenant très répandu. Chaque nouvelle version du protocole augmente sa vitesse.
L’avenir semble appartenir aux protocoles basés sur un signal numérique. Avantage supplémentaire : avec le DShot, des commandes spécifiques peuvent être envoyées aux ESC et il n’est plus nécessaire de les calibrer.
A noter que les ESCs permettent parfois de remonter des informations de télémétrie (courant consommé).
Dimensionnement
Ici rien de sorcier, on a choisi nos moteurs, il suffit de se reporter à la documentation pour savoir quel courant maximum nos ESCs devront pouvoir supporter.
Pour mon build
Dans mon cas, voici la grille fournie par T-MOTOR :
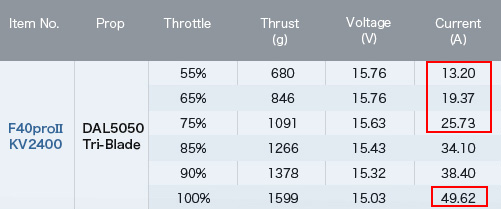
Dans une utilisation freestyle, on ne donne que de brefs coups full gaz, on est plus souvent autour de mi-gaz. Ce qu’il faut retenir, c’est que je dois trouver des ESCs capables d’encaisser des pics à 50A et soutenir 25-30A en continu pour être tranquille.
Mon choix s’est porté sur la nouvelle version du TEKKO32 4-IN-1 35A. Dans cette nouvelle version, ils ont ajouté un blindage en cuivre au-dessus des mosfets pour éviter les interférences avec la FC et optimiser le refroidissement. Ils débitent jusqu’à 50A en pointe, tournent sous BLHELI32 et supportent le DShot1200. Ils acceptent des lipos jusqu’à 6S, ce qui me laisse la possibilité de changer les moteurs plus tard pour passer sur un setup 6S.
Pour aller plus loin
ESC FIRMWARE AND PROTOCOLS OVERVIEW
6. La carte de vol (FC, Flight Controller)

Nous arrivons dans le cœur de nos multirotors ! La FC est le chef d’orchestre, elle reçoit les consignes de la radiocommande via le RX, récupère l’état du quad via ses capteurs (gyro…), applique des traitements (filtres), analyse la correction nécessaire pour aller vers la consigne reçue, et donne les instructions aux ESCs pour qu’ils actionnent les moteur en conséquence.
Le processeur
On devrait plutôt parler de micro-contrôleur (MCU) pour être précis.
Là, les choses sont assez simples, les MCU les plus répandus pour notre hobby sont ceux produits par STMicroelectronics, basés sur les processeur 32 bits ARM. On retrouve, par ordre chronologique, les modèles suivants : F1, F3, F4, F7. Entre chaque version, vitesse, mémoire disponible et nombre d’entrées/sorties augmentent. Un F7 sera cadencé à 216Mhz contre 72Mhz pour un F3.
Plus un MCU sera véloce, plus il pourra traiter rapidement les données remontées par les capteurs (en particulier du gyro) et gérer de choses (LEDs, filtres avancés…). Il y a également quelques différences en terme de fonctionnalités.
On trouve encore des FC basées sur MCU F3, mais les F4 deviennent le standard. Les F7 sont plus récentes et commencent à être bien supportées par les différents firmwares. On voit de soit-disant F10, qui sont en fait 2 MCU (F7 + F3). Le système n’en reste pas moins malin et efficace d’après les premiers retours.
Pour aller plus loin :
F1, F3, F4 AND F7 FLIGHT CONTROLLER DIFFERENCES EXPLAINED
Les fonctionnalités
On a abordé le sujet un peu plus haut : il est fréquent que la FC cumule plusieurs rôle aujourd’hui : PDB, OSD… On parle de FC AiO (All-in-One). Cela simplifie le montage et allège le quad.
Le firmware
On va se concentrer sur les firmwares dédiés à nos mini multirotors, taillés pour la race, le freestyle ou le freeride tranquille. Je laisse de côté ceux équipés de pilotage automatique pour de la prise de vue (ArduPilot, iNav…).
On va commencer par évoquer les forks (dérivés) de BaseFlight (aujourd’hui obsolète), des contrôleurs de vol Open Source :
- Cleanflight : version nettoyée de BaseFlight, en perte de vitesse face aux avancées de Betaflight.
- Betaflight : à la base un fork de CleanFlight, il est aujourd’hui le plus répandu, et pour cause, il supporte énormément de FC, les mises à jour sont fréquentes, les fonctionnalités très nombreuses.
- Butterflight : fork de Betaflight.
- RaceFlight : un autre fork.
D’autres contrôleurs de vols, propriétaires cette fois :
- KISS : Firmware qui se veut simple d’utilisation. Beaucoup de pilotes ne jurent que par ce firmware. Attention, il faut impérativement une FC KISS et des ESCs KISS sont également recommandés.
- FlightOne : je l’ai mis ici parce qu’il a été développé par l’équipe de RaceFlight, mais il n’est plus Open Source, donc difficile de dire s’il reste des choses de BF. Dédié aux FC Revolt.
En gros, Betaflight, c’est le PC du drone : très répandu, supporte une grosse quantité de matériel, et c’est Open Source (ça ressemble donc plus à Linux qu’à Windows 😉 ). KISS, c’est plus le Apple du hobby : code fermé, matériel très restreint, mais simple à configurer avec de très bonnes sensations.
Je ne connais que Betaflight, il me plait beaucoup et j’adhère à la philosophie. Néanmoins, à force d’entendre dire du bien de KISS, ça pique ma curiosité, j’ai l’impression de passer à côté d’un truc… peut-être pour un prochain build 🙂
Pour mon build
Pour ce premier build, je reste sur Betaflight que je connais bien, chaque chose en son temps 🙂
J’ai décidé de partir sur une FC à base de F7 dans une optique d’avenir, pour supporter tranquillement les prochaines versions (et fonctionnalités) de Betaflight, en particulier la v4.0 qui devrait arriver d’ici 2-3 mois. Et le boost de puissance donne la possibilité de monter la fréquence de la boucle PID et de la lecture du gyro. Le F7 évacue aussi une contrainte qu’avaient les F4 (mais pas les F3) : les différents UART sont capables d’inverser les signaux de manière matérielle. Il y a des contournements, mais c’est plus pratique quand c’est géré nativement.
Pour me faciliter la vie, j’ai opté pour une tour (ou stack) qui embarque un étage pour les ESCs et un autre pour la FC. J’ai la garantie que l’alliance de ces 2 éléments ne me réservera pas de mauvaise surprise et le câblage sera simplifié.
Après un peu de lecture, j’ai choisi la KAKUTE F7 & TEKKO32 4-IN-1 ESC. Une review est dispo sur le site d’Oscar Liang. Elle s’alimente directement depuis la batterie et embarque notamment un régulateur 5V (2A), je n’aurai pas besoin de PDB. Au passage, la documentation de cette FC est d’une qualité irréprochable !
7. L’émetteur vidéo (VTX)

Ce ne sont pas les options qui manquent 🙂
Les principaux paramètres à prendre en compte sont :
- la puissance : les puissances disponibles s’étendent entre 25mW et 800mW (parfois davantage encore). Plus la puissance est élevée, plus la portée sera étendue. En contre-partie le VTX consommera et chauffera davantage. Et à partir de 200mW, on peut gêner les autres pilotes à proximité. A noter qu’en France, la loi tolère une émission jusqu’à 25mW seulement, sur la page des 5.8Ghz. Ça reste pratique de pouvoir monter au delà pour en profiter à l’étranger 😉
- les bandes de fréquences disponibles : selon l’utilisation, on cherchera un VTX qui supporte certaines bandes de fréquences, en particulier la fameuse « Race Band », dont les canaux sont plus espacés pour limiter les interférences. Certaines fréquences sont cependant interdites en France. Enfin, on s’assurera que le VTX choisi partage en bonne partie les mêmes bandes que notre récepteur (lunettes, masque…).
On pourra être intéressé par d’autres fonctionnalités :
- le pilotage du VTX par la FC (SmartAudio), pour pouvoir modifier la puissance ou la fréquence d’émission directement depuis la radiocommande ou l’OSD
- le pitmode : pour allumer son quad et faire quelques tests à une puissance extrêmement faible (on ne gène personne et le VTX ne chauffe pas) avec une portée de quelques mètres.
- présence d’une sortie d’alimentation pour la caméra FPV
- disposer d’un type de connecteur d’antenne spécifique
- la configuration via NFC (avec un smartphone ou un device spécifique)
- format : un VTX sur une carte ayant un format standard, permettra de s’adapter à des trous de montage de 30.5mm ou 20 mm, ce qui offre la possibilité de le positionner au dessus de la FC ou sur une stack de 20×20.
- DVR embarqué
- Microphone embarqué
- La possibilité de transmettre l’audio
- …
Si on ne devait citer que 2 VTX, qui sont de grosses références dans le milieu, ça serait :
- TBS UNIFY PRO 5.8 GHZ HV
- IMMERSIONRC TRAMP HV
Il y a plein d’autres alternatives de très bonne qualité (chez Atlal par exemple). D’ailleurs aucun de ces 2 modèles n’est prévu pour être stacké facilement (avec trous de montage).
Pour mon build
Après une expérience moyenne avec le VTX bas de gamme du Tyro99 (bien en dessous de celui de mon XJB145), j’ai voulu prendre quelque chose d’éprouvé, j’ai donc opté pour le Tramp HV. La possibilité de configurer le VTX par NFC a fait pencher la balance (finalement, il faut connecter un composant supplémentaire, je n’utiliserai pas cette fonctionnalité).
Pour aller plus loin
Fréquences vidéo, les explications (HelicoMicro)
8. La caméra FPV

Ici aussi le choix est vaste, les principaux acteurs sur le marché: Runcam, Foxeer, Caddx… L’équipe de We Are FPV publie régulièrement des comparatifs très intéressants pour se donner une idée rapidement.
Les principaux critères à prendre en compte :
- La taille : à accorder en fonction de votre châssis. Le standard « full size » (env. 28mm * 26mm) se raréfie au profit des caméra « mini » (env. 21.8 * 21.8 mm) et surtout « micro » (env. 19mm * 19mm). Des adaptateurs existent pour repasser sur un format « full size » depuis une caméra plus petite.
- Le format : Certaines capturent en 16/9, la plupart en 4/3 et certaines sont switchables. De préférence, accorder le choix à vos lunettes ou masque. Cependant, je suis en 16/9 sur mes lunettes avec une Swift 2 et ça ne me pose pas de problème
- Le type de capteur : CMOS ou CCD. Je n’ai testé que des caméras CCD jusqu’ici et j’en suis très content. Mais je me garderai bien de conseiller une techno plus qu’une autre ! D’après ce que j’ai pu lire, les avis sont assez partagés. Je vous laisse vous documenter 🙂
- Microphone : si vous souhaitez renvoyer l’audio à vos lunettes, il faut un micro sur la caméra.
- OSD : si vous n’avez pas d’OSD (sur la FC par exemple), certaines caméras proposent un OSD basique, avec notamment la possibilité d’afficher la tension de la batterie.
Pour mon build
Comme je l’ai expliqué au début, étant satisfait de ma Runcam Swift 2, qui dispose d’un micro et ayant plein de lentilles de rechange en stock, je vais rester sur ce modèle. Le format « full size » est compatible avec mon châssis, je n’aurai donc pas besoin d’adaptateur.
9. Le récepteur radio (RX)

Ce choix est intimement lié à votre radiocommande. Je vous laisse donc trouver ce qui ira le mieux. Néanmoins quelques détails à prendre en compte :
- Le protocole à utiliser et le nombre de voies
- La télémétrie, pour remonter des infos à la radio
- La présence d’une double antenne
- La taille
- Le connecteur d’antenne
- Pour du FrSky, accordez votre RX à votre radio (EU-LBT ou FCC), ça vous évitera un flashage du RX
Pour mon build
J’ai choisi un FrSky R-XSR EU-LBT, que j’utilise sur mes autres quads : il est très compact et dispose de toutes les options qui vont bien (télémétrie, double antenne…).
10. Les lipos

Maintenant que l’on connait l’ensemble de nos composants, ont peu choisir une batterie adaptée. On prendra en compte essentiellement les caractéristiques des moteurs et des ESCs.
Je reprends la fiche de mes moteurs :
Les chiffres ici sont donnés pour une tension de 15V, soit du 4S (4 x 3.7 = 14.8V). Les gaz à fond, ils consomment 50A. Donc 4 moteurs à fond : 200A. Il me faudrait donc en théorie une batterie capable de délivrer 200A.
Certains recommandent même le double pour avoir de la marge (étant donné que les fabricants de lipos ont tendance à exagérer les caractéristiques de leurs batteries). On va rester sur le calcul de base, sinon on ne trouvera aucune lipo 😉 De plus, les hélices indiquées ont un pas très important et tirent donc plus de courant que celles que je mettrai.
Pour rappel, pour calculer le courant maximum soutenable pour une batterie, on appliquera la formule : Capacité x Taux de décharge. Exemple, pour une batterie 4S 1500mAh donnée à 100C-200C Max, on aura : 1.5 x 200 = 300A en pic. Une telle batterie pourrait donc bien convenir pour mon build !
Les critères à prendre en compte :
- Nombre de cellules ou tension : Se reporter à la fiche des moteurs et des ESCs
- Capacité : Se reporter au calcul évoqué précédemment
- Taux de décharge : Se reporter au calcul évoqué précédemment
- Type de connecteur : XT-60, XT-30, JST…
Pour se faciliter la vie, on peut se baser sur ces bonnes pratiques indiquées par Oscar Liang (et qui me semblent tout à fait réaliste) :
| Diamètre des hélices | Plage de capacité recommandée |
| 6 pouces | 1500mah – 2200mah |
| 5 pouces | 1300mah – 1800mah |
| 4 pouces | 850mah – 1300mah |
| 3 pouces | 650mah -1000mah |
Ici encore, les chiffres sont donnés pour du 4S. En 5″ avec des lipos 6S, on se dirigera vers une capacité de 900mah à 1200mah.
Quelques marques réputées : Tattu, CNHL, ACEHE, EPS, Infinity… même si tous les modèles ne sont pas parfaits.
Pour mon build
Le but était de conserver mes lipos actuelles : essentiellement des CNHL – 1500MAH 4S 100C G+PLUS et BATTERIE LIPO TATTU 4S 1550MAH 75C. Et ça ira très bien !
Pour aller plus loin
Guide des composants | Comprendre les LiPo (Culture FPV)
Lipos, la règle d’or : calculez le nombre de C nécessaires (FPV Passion)
Comprendre les drones : Les batteries (Maelremrem)
HOW TO CHOOSE LIPO BATTERY FOR MINI QUAD, DRONES AND QUADCOPTERS (Oscar Liang)
11. Les accessoires supplémentaires
Le condensateur de filtrage
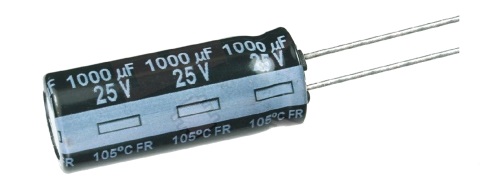
Les moteurs et les ESCs puissants qui équipent nos quads génèrent beaucoup de bruit dans l’électronique. Il peut nuire à la qualité du signal vidéo récupéré de la caméra FPV et même perturber d’autres composants et impacter la qualité du vol.
La solution réside dans l’ajout d’un condensateur pour filtrer ce bruit. En général, on soude un gros condensateur de 1000 µF sur les pads de la pigtail qui permet de brancher la lipo (en 25 V pour le 4S, en 35 V pour du 5 ou 6S). L’autre possibilité, dans le cas d’ESCs séparés, un condensateur peut être soudé sur l’alimentation de chaque ESC.
Pour aller plus loin :
Pourquoi et quel condensateur utiliser sur son drone (We Are FPV)
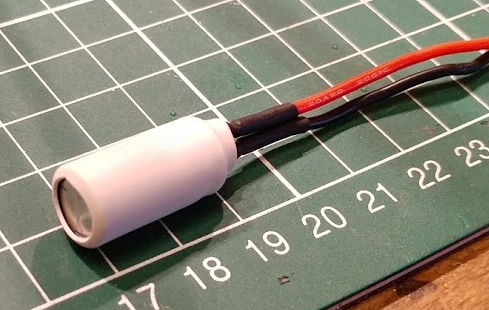
Le buzzer/balise

Il est pratique d’équiper son drone d’un buzzer. Il permet de remonter des alertes de manière sonore, mais surtout, on peut l’activer pour retrouver plus facilement un quad qui s’est crasher dans des hautes herbes, des arbres etc.
Des modèles plus avancés embarquent une batterie : en cas d’arrachage ou vidage de la lipo, le buzzer est capable de signaler sa présence pendant plusieurs heures ou jours. Quelques exemple : ViFly Finder 2, DroneKeeper, Hellgate Buzzer…
Pour ma part, j’ai opté pour un ViFly Finder 2 dont les retours sont très bons.
Pour aller plus loin :
VIFLY Finder, test du buzzer autonome (We Are FPV)
L’antenne VTX

Pour transmettre le signal vidéo, il nous faudra une antenne 5.8 Ghz. On trouve de tout, de 5€ à plus de 50 €. Les critères à prendre en compte :
- Le type connecteur (SMA ou RP-SMA)
- La polarisation (RHCP ou LHCP ==> Right ou Left), à accorder avec les antennes de vos lunettes/masque (le RHCP est plus courant)
- Type d’antenne (pagoda, linéaire…)
- Longueur
- Robustesse (généralement, plus on monte en gamme, plus elles seront bien protégées)
J’ai opté pour des antennes TBS Triumph en SMA RHCP.
LEDs
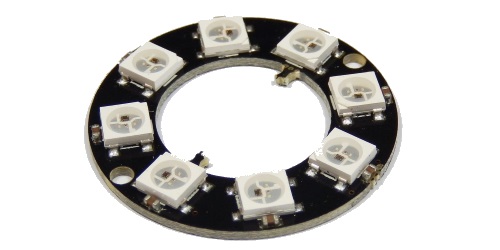
Il est fréquent d’ajouter des LEDs sur nos bolides, nombreuses sont les FC capables de piloter des LEDs de type WS2812. La motivation est très souvent esthétique, mais ça permet aussi de rendre son drone plus visible, notamment lorsque la luminosité est faible. En vol à vue, on pourra plus facilement repérer l’orientation du quad. En général, les LEDs sont positionnées sur l’arrière, mais il est aussi fréquent d’en retrouver sur les bras.
Pour mon build, je n’utiliserai pas une bande de LEDs, mais plutôt un anneau, pour faire un peu original et donner une impression de réacteur à l’arrière 😉
Autres…
On a vu l’essentiel pour une configuration classique, mais d’autres options sont possibles, comme un GPS par exemple : ça peut être utile dans le cas de vol sur de longues distances pour retrouver facilement son quad en cas de crash.
Je n’ai pas abordé la question de la caméra HD, ça dépasse un peu le sujet déjà très vaste de cet article et c’est un composant à part (elle n’est pas alimentée ni connectée au quad).
C) Préparation au montage
1. Analyse de l’ensemble des composants
Commençons par résumer l’ensemble des choix faits dans la partie précédente :

| Composant | Référence | Prix (€) |
|---|---|---|
| Châssis | TBS SourceOne v0.2 | 35 |
| Moteurs | 4x T-MOTOR F40 PRO II – 2400KV | 100 |
| ESCs | TEKKO32 4-IN-1 35A ESC | 55 |
| Contrôleur de vol | KAKUTE F7 | 45 |
| VTX | IMMERSIONRC TRAMP HV | 30 |
| Caméra FPV | RunCam Swift 2 | 45 |
| RX | FRSKY R-XSR (EU-LBT) | 20 |
| Lipo | CNHL – 1500MAH 4S 100C G+PLUS | 25 |
| Buzzer autonome | Vifly Finder 2 | 15 |
| Antenne VTX | TBS TRIUMPH SMA 5.8GHZ RHCP | 20 |
| LEDs | Anneau de 8 LEDs WS2812 5050 | 5 |
| Condensateur | CONDENSATEUR PANASONIC LOW ESR 1000UF 25V | |
| Hélices | DALPROP Cyclone series T5046C (entre autres) | |
| Divers | Entretoises moletées Silver | |
| Divers | Pigtail XT60 | |
| Total : | 395 € |
C’est le moment qui pique un peu… près de 400€. Encore plus en réalité parce que j’ai pris plein de spares (moteurs, châssis, hélices, LEDs…) sans parler de toutes les petites bricoles. Bon, en théorie, on sait d’avance combien ça va nous coûter quand on fait bien les choses 😉 Je précise que l’ensemble des composants vient de shop français.
Je me suis lâché sur des composants de qualité, il y a moyen de faire une config équivalente pour bien moins cher, mais c’était Noël !
Bref ! Nous avons la config complète, il est temps, si ce n’est pas déjà fait, de récupérer la documentation de tous les composants, et surtout de la lire avec attention. Je pense en particulier à la documentation de la FC. Le but est de savoir comment câbler et configurer tout ca !
En plus des documentations officielles, toutes les sources d’informations sont bonnes à prendre : tests, retours sur les forums, vidéos de montage sur Youtube…
Avant de passer à la suite, il faut être en maîtrise du matériel que l’on va assembler pour éviter de faire des bêtises, parfois coûteuses 😉
2. Diagramme de câblage
Pour y voir plus clair, une bonne pratique est de dessiner un diagramme de raccordement de l’ensemble de l’électronique. Il ne s’agit pas de faire un schéma électronique, simplement représenter les connexions entre les différents éléments.
Je ne sais pas s’il existe des outils pour faire ça plus facilement, j’ai simplement utilisé un logiciel de dessin, récupéré des photos de chaque élément et dessiné les fils.
Voici ce que ça donne pour mon build :
 Cliquer sur le diagramme pour l’agrandir
Cliquer sur le diagramme pour l’agrandir
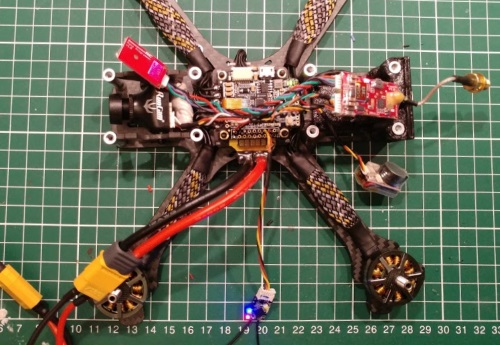
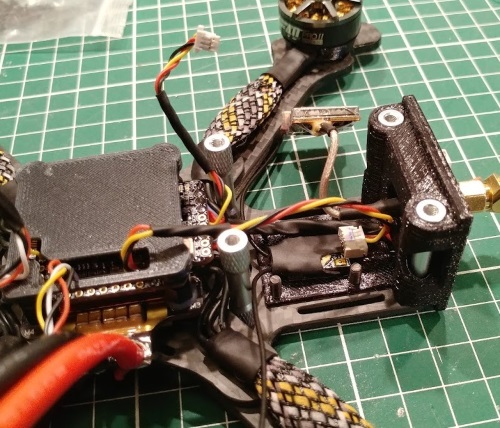
3. Agencement des composants
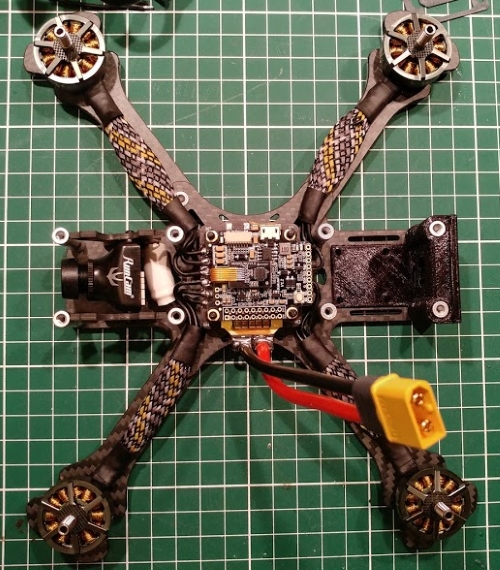
Voici venu le moment du Tétris ! On a plein de trucs à faire rentrer dans un châssis. Donc on va prendre un peu d’avance et assembler la partie inférieure du châssis pour faire quelques simulations de disposition des composants (ne pas hésiter à faire l’éventuelle préparation du châssis à ce moment là).
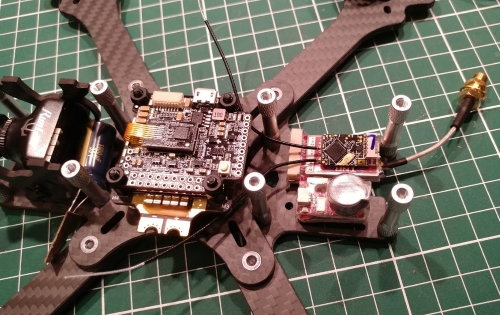
Il manque l’anneau de LED que je mettrai à l’arrière. On voit qu’il y a de la place, la difficulté sera de faire quelque chose de propre, surtout au niveau de la stack arrière où je dois faire rentrer le RX, le VTX avec son câble/support antenne, le ViFly et l’anneau de LEDs. Evidemment, rien de tout ça ne dispose de trous au format 20×20 😉
Si vous disposez d’une imprimante 3D, c’est le moment de concevoir et/ou d’imprimer quelques pièces qui vous permettront de customiser votre châssis.
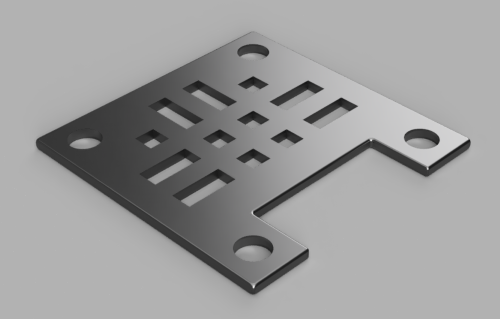
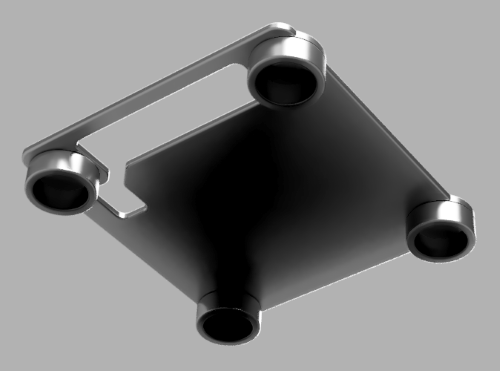
Tout d’abord, j’ai modélisé un support arrière qui se fixe sur le châssis et les 2 entretoises, pour y attacher l’antenne et surtout l’anneau de LEDs :
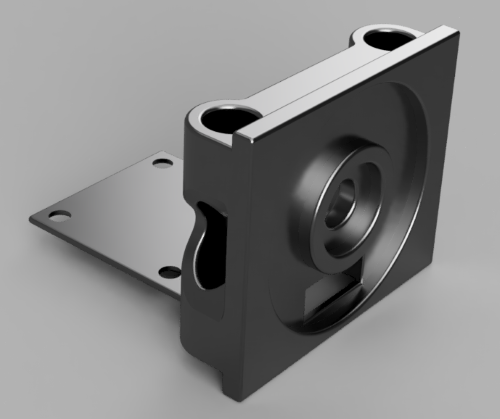
Je l’ai imprimé en TPU, pour absorber les vibrations et avoir une pièce qui ne cassera pas. De plus, l’attache sur les trous de la stack en 20*20mm me permet d’avoir une fine couche isolante de la frame et amortissant les vibrations sur laquelle je pourrai fixer le RX.
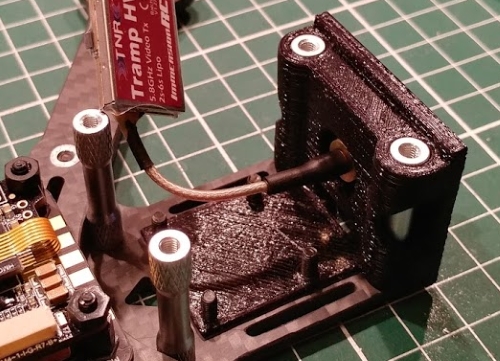
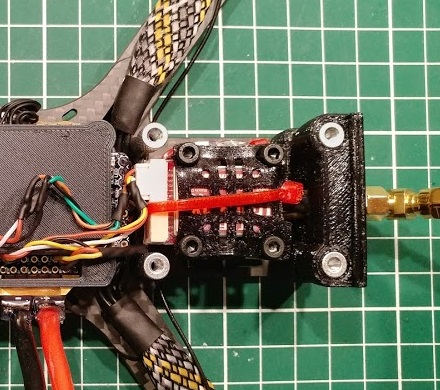
J’ai installé le RX au premier étage, en le prenant en sandwich avec une autre pièce en TPU :
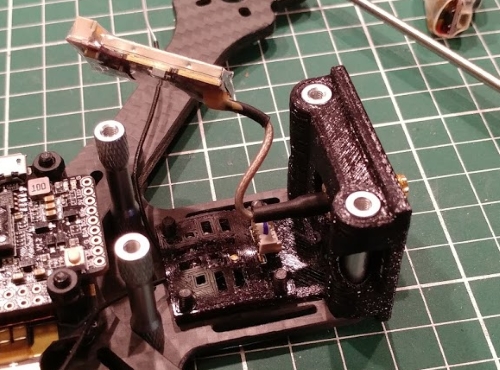
Le RX est bien calé, ses antennes ressortent où je voulais (je vais les fixer sur les bras) et ne sont pas collées à l’antenne du VTX. Le bouton de binding restera accessible.
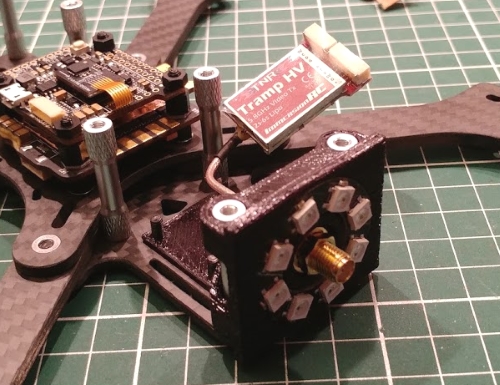
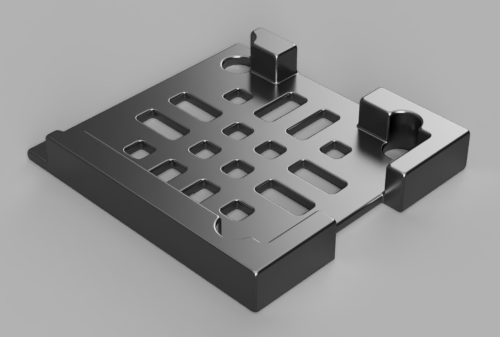
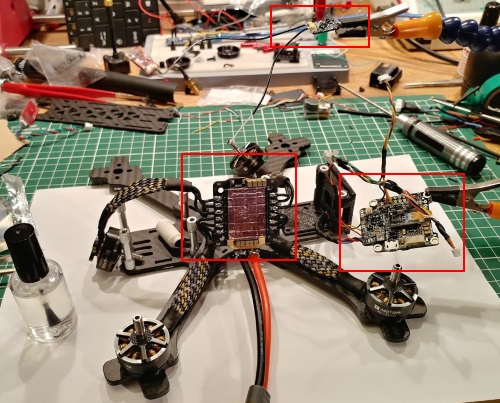
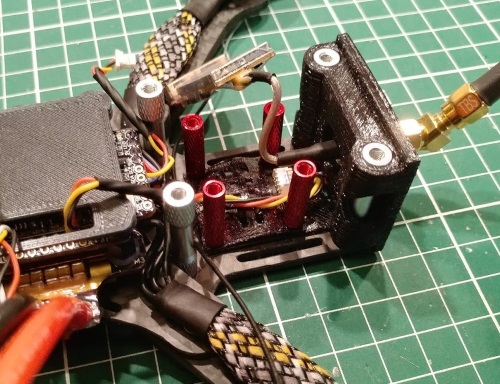
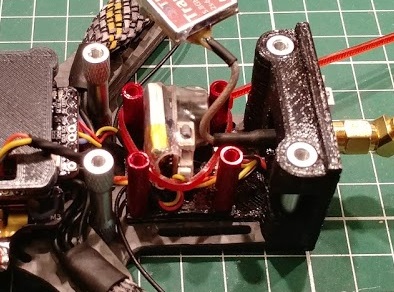
Au dessus, j’installe le ViFly, bloqué entre des entretoises de 20mm, je lui ajouterai une fixation supplémentaire en sécurité, même s’il ne bouge pas. Enfin, au dernier étage, j’installerai le VTX dans un support spécifique pour l’occasion (ce Tramp HV n’est pas évident à fixer) :
Ce qui nous donne :
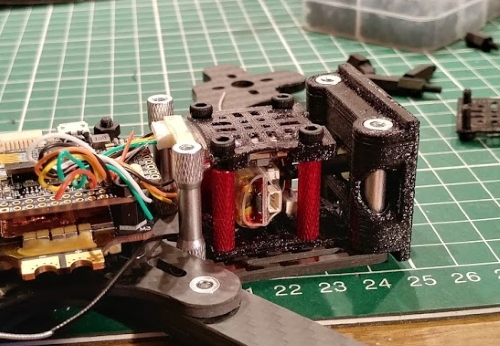
Je suis assez content du résultat : rien ne bouge, les boutons des RX, VTX et ViFly restent suffisamment accessibles, le RX et le VTX sont éloignés, le tout est bien protégé au centre du châssis et la chaleur du VTX sera évacuée par le haut de la stack.
La FC que j’ai choisie embarque un gyroscope softmounté. Une précaution importante à prendre : rien ne doit venir en contact avec le gyro sous peine de causer de beaux crashs. Il faudra faire attention à ce qu’aucun fil passant au dessus de la FC ne vienne s’y frotter. Pour ce faire, j’ai designé un petit « couvercle » qui ne laissera accéder qu’aux pads de la FC et protégera le gyro.
Edit : Je n’ai finalement pas utilisé cette pièce : avec la sangle de serrage de la batterie, je n’avais pas assez de hauteur disponible au dessus de la stack, j’ai utilisé des colliers de serrage pour empêcher les fils de toucher le gyro.
Pour Noël, je me suis fais un petit plaisir : une GoPro Hero Session 5. Et comme elles ne sont plus fabriquées, elles coûtent une fortune. Alors pour bien la protéger, j’ai commandé une Madcase. J’ai conçu un petit support qui sera adapté à la TBS Source One, il est incliné à 25°, je ne suis pas encore prêt pour passer à 30° ou plus 😉 :
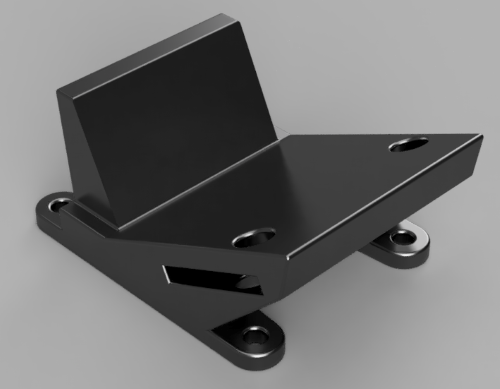
Au passage, comme il est en Open Source, un des avantages de ce châssis TBS SourceOne, est que ses plans sont disponibles, j’ai pu les utiliser comme base de ce modèle 3D qui s’adaptera donc parfaitement au châssis.
4. Précautions à prendre
Il y a quelques recommandations à essayer de suivre, dans la mesure où notre châssis nous en laisse l’opportunité, certaines sont assez importantes, d’autres plutôt secondaires :
- Le carbone qui constitue nos châssis est conducteur ! Attention à tout contact entre les composants et la frame. Le connecteur pour l’antenne VTX est la masse de l’antenne, il est préférable qu’il ne touche pas le châssis pour éviter les interférences. On peut soit imprimer un support en TPU, soit bricoler une isolation ou utiliser des pads adaptés.
- Dans la mesure du possible, on essaiera d’espacer les antennes du VTX et du RX. J’ai lu que le Tramp HV était assez sensible de ce côté là.
- Pour l’alimentation des différents périphériques via un régulateur 5V ou 12V, bien s’assurer que l’ensemble ne consommera pas plus de courant que le régulateur n’est capable d’en fournir.
- Il faut softmounter la FC pour limiter les vibrations qui pourraient perturber le gyroscope. Sur certaines FC (comme la mienne), le gyroscope est déjà softmounté sur la FC, rendant facultative l’utilisation d’entretoises ou de rondelles en caoutchouc.
- Si le gyroscope est directement sofmounté sur la FC, attention à ce qu’aucun fil ou autre élément ne vienne à son contact et fasse partir en vrille votre multi
- Il est fréquent de softmounter également les moteurs à l’aide de petits pads en silicone ou imprimé en TPU à intercaler entre les fixations des moteurs et les bras du châssis.
- Si votre RX a 2 antennes, il vaut mieux les orienter perpendiculairement l’une à l’autre pour en tirer le meilleur : si elles sont parallèles, alors elles couvrent le même espace et c’est comme si l’on en avait qu’une.
- Pour avoir le moins de bruit possible au niveau du signal vidéo, il est recommandé de connecter la masse de la caméra au plus proche de la masse du VTX. Idéalement utiliser le même pad sur la FC ou alimenter la caméra à partir du VTX si ce dernier propose cette option (l’alimentation de la caméra FPV sera d’autant mieux filtrée)
- L’utilisation de gaine tressée sur certains câbles (moteurs, alimentation…) permet d’avoir un build plus propre et protège les fils. Comme pour la gaine thermo, bien penser à la positionner avant les soudures 😉
D) Le montage, tips, étanchéité, pièges à éviter
1. Prérequis
Pour la suite du programme, le principal prérequis, c’est de savoir souder. Si c’est nouveau pour vous, pas de panique, ce n’est pas si compliqué. Je vous invite à regarder quelques tutoriaux sur Youtube. En voici un très bien de chez We Are FPV (par David de CultureFPV).
Quelques remarques de sécurité :
- Lors de vos tests, retirez toujours les hélices de vos moteurs, vos doigts vous remercieront
- N’alimentez pas le quad tant que les vérifications adéquates n’ont pas été faites (on y reviendra)
- Utilisez un ventilateur pour ne pas respirer la fumée de l’étain
- En cas d’utilisation de produits chimiques (étanchéification…), assurez vous d’être dans un espace aéré
- Si vous limez le carbone, utilisez un masque pour ne pas respirer les particules, ou mieux, faites ça dans une bassine d’eau pour fixer la poussière
- Faites attention aux projections de soudure sur l’électronique
Enfin les prérequis en terme d’outillage, rien de très exotique : fer à souder avec thermostat qui monte à 350-400°C, étain de qualité, pince à couper, pince à dénuder, pompe et/ou tresse à dessouder, une troisième main, de la gaine thermo, un multimètre, du fil silicone fin (pour les signaux), quelques fils plus épais pour transporter de plus gros courants, un set de tournevis hexa, quelques cruciformes, une clé de 8 pour les hélices, des pinces de précision, cutter, scotch double face épais, glue…
2. Bonnes pratiques, astuces et pièges à éviter
Comme pour le chapitre précédent sur les préconisations, tout n’est pas obligatoire, mais certaines vérifications sont fortement recommandées :
- FAIRE DES TESTS DE CONTINUITÉ tout au long du montage. Ça serait dommage de brancher une lipo en fin de montage et tout cramer à cause d’un court-ciruit. Répéter ces tests au fur et à mesure de l’avancée. Pour cela, on utilise un multimètre : soit une fonctionnalité de test de continuité (avec bip sonore) est disponible, soit on le règle en ohmmètre et on s’assure d’avoir une résistance infinie entre les bornes + et – de l’alimentation du quad (c’est valable pour les autres composants également).
- Utiliser un Smoke Stopper pour le branchement de la première lipo. Si malgré les tests précédents un court-circuit est tout de même présent, ce petit outil permettra de le détecter et protégera tout votre électronique ! On en trouve pour quelques euros, par ici par exemple. Mais vous pouvez aussi fabriquer le votre en suivant ce tuto de chez We Are FPV.
- Ne jamais alimenter le VTX sans son antenne, sous peine de l’endommager
- Ne jamais laisser les hélices sur les moteurs pendant que l’on travaille sur le quad (on peut très bien tester les moteurs sans charge utile, mais ne pas abuser en montant fort les gaz trop longtemps)
- Vérifier les tensions d’alimentation prévues pour vos composants
- Toujours vérifier que les mouvement réels appliqués au quad sur tous les axes sont correctement interprétés par la FC (dans Betaflight, un modèle 3D permet de visualiser cela simplement) : par exemple, si l’orientation du gyro indiquée dans la configuration du firmware est erronée, le quad « deviendra fou » (et dangereux) au premier coup de gaz.
- Si la FC n’a pas été montée selon l’orientation par défaut, ne pas oublier de compenser dans la configuration du firmware, sinon au premier coup de gaz le quad fera n’importe quoi.
- Dans le même registre et dans le cas d’ESCs 4-en-1, si la carte n’est pas orientée dans le sens par défaut, il faudra remapper les moteurs, sinon la conséquence sera la même que pour les 2 points précédents. Le plus simple est de tester les moteurs chacun leur tour et s’assurer que le moteur actionné est bien celui ciblé. On en profitera pour vérifier que chaque moteur tourne dans le bon sens.
- Utiliser de la gaine thermo pour limiter les risques de court-circuits.
- Le grand classique : ne pas oublier de passer la gaine thermo avant de souder les 2 extrémités d’un fil 😉
- Étamer les fils et les pads avant de les souder
- Vérifier que les vis des moteurs ne viennent pas toucher le bobinage des moteurs (ça peut arriver si elles sont trop longues). On peut vérifier ce point en faisant un test de continuité entre chaque vis et les ESCs. Ca peut également expliquer la chauffe anormale d’un moteur.
- Utiliser du Loctite pour sécuriser les vis
- Sécuriser la pigtail du XT60 : on voit souvent des builds dans lesquelles le connecteur XT-60 est directement soudé sur la PDB (ou ESC, ou FC). Esthétiquement, c’est plus joli, c’est sûr, mais il faut garder en tête qu’en cas d’arrachement de la Lipo, elle risque d’emporter tout l’électronique avec elle. Une sécurité est d’attacher cette pigtail à une partie du châssis avec une pièce imprimée ou un collier de serrage (zip tie) (à un bras ou une entretoise).
- Lors des soudures : attention aux éclaboussures d’étain. Une micro gouttelette mal placée peut faire un carnage. On évitera donc de souder au-dessus de l’électronique ou on intercalera une protection.
- Le flux contenu dans la soudure est abrasif, il est recommandé de le nettoyer après les soudures (on a souvent des petites éclaboussures partout) avec de l’alcool isopropylique à 99.9%.
- On peut éventuellement sécuriser les connecteurs avec une goutte de colle chaude. Si un moteur/ESC cesse de fonctionner sans raison particulière (avec un ESC4-en-1), commencer par s’assurer que le nappe qui relie la FC aux ESCs n’est pas légèrement déclipsée.
- En fin de build, toujours vérifier le serrage de l’intégralité des vis
- Attention à ne pas trop serrer les vis sur les entretoises plastic.
- Les pattes des condensateurs ont une forte résistance, il est préférable de les réduire à une dizaine de millimètres et si nécessaire d’y souder des fils plus larges (AWG 20 par exemple).
- Dans la mesure du possible, utilisez des fils avec gaine silicone, ils sont infiniment plus faciles à souder et manipuler. C’est valable aussi pour les moteurs : certains moteurs d’entrée de gamme ont une gaine plastic, c’est plus rigide, ça fond lors de la soudure, bref, pas top.
- Vérifier que le capteur de tension de la FC est bien étalonné : la tension relevée par la FC (visible dans l’OSD, le configurateur…) doit correspondre à la tension mesurée avec un voltmètre. Si ce n’est pas le cas, cela est généralement facile à corriger.
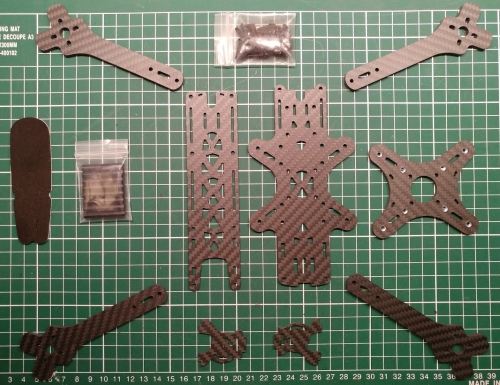
3. Préparation du châssis
Nous y voilà, il est temps de s’y mettre vraiment. La première chose à assembler est bien sûr le châssis, voici les pièces de ma TBS SourceOne v0.2.
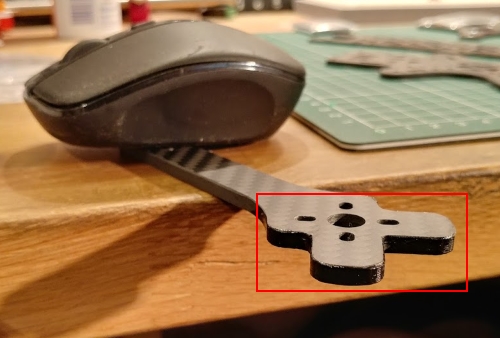
La première étape consiste à chanfreiner les arrêtes de la frame. Ce traitement peut déjà avoir été appliqué sur les châssis haut de gamme. Ce n’est pas obligatoire, mais c’est une bonne pratique, voici quelques raisons :
- En cas de choc sur une arrête, avec un chanfrein, ce dernier sera mieux absorbé : si l’arrête est fine, voir tranchante, elle aura tendance à casser plus facilement et des petits éclats de carbone risquent de sauter
- Sur des châssis low cost (bien souvent des copies), les arrêtes peuvent être coupantes, cette étape évitera les blessures lors de la manipulation du quad
- Enfin, les fils frottant sur les arrêtes peuvent également être cisaillés sur le temps, le carbone de la frame étant conducteur, ça peut mal se finir. C’est aussi valable pour les rislans et autres sangles batteries.
Pour cette opération, nous auront besoin de :
- un set de limes diamant (on trouve des sets pour une dizaine d’euros chez Amazon par exemple).
- Une bassine d’eau
Le carbone, lorsqu’il est limé génère des particules très fines et volatiles, et vous ne voulez surtout pas les respirer !
La solution la plus simple, consiste à faire tout ce travail dans l’eau pour fixer la poussière de carbone.

Une fois le travail terminé, l’eau est noire ! Sur la photo suivante la poussière de carbone s’est déposée au fond de la bassine. Elle est mieux là que dans nos poumons 😉

Pas besoin de chanfreiner comme un fou, on veut juste casser les arrêtes en limant à 45°. Attention aux dérapages qui rayeront le châssis, ce n’est pas grave, mais c’est dommage, autant essayer de les limiter.
On peut également chanfreiner les trous où l’on passera des rislans ou des fils. Par contre, attention à ne pas chanfreiner les trous dédiés à emboîter le support de caméra par exemple.

Dernière étape, également facultative : renforcer les bords autour des moteurs. En cas de crash, ils sont souvent les premiers à impacter le sol. Si le bras ne casse pas, le carbone par contre peut être sérieusement attaqué et commencer à se délaminer. Pour limiter cet effet indésirable, on peut appliquer de la colle cyanolite (de la Super Glue) sur les bords de l’extrémité de chaque bras. On peut également utiliser des protections en TPU.
Ces 2 étapes sont illustrées dans la première partie de cette vidéo.
Il n’y a plus qu’à assembler le châssis, sans positionner la top plate pour le moment bien sûr. Pour des raisons purement esthétiques, j’ai remplacé les entretoises livrées.

4. Montage 1/2
Certes, le montage ne fait que commencer, mais le plus gros est fait, quand on sait exactement ce que l’on va faire, le montage est finalement l’étape la plus rapide.
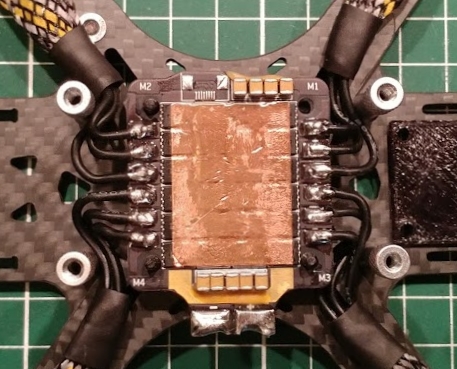
Moteurs et ESCs
Après avoir installé les moteurs, on commence par souder les moteurs et les ESCs (et éventuellement la PDB si vous en avez une). Pour mon build, j’ai des ESCs 4-en-1, donc je soude directement les moteurs sur les ESCs, au bas de la stack centrale.
Avant d’attaquer les soudures, pensez à placer la gaine si vous souhaitez en utiliser (thermo ou tressée). Une fois cela fait, on va pouvoir couper les fils moteurs à la bonne taille, dénuder les extrémité et les étamer.
Attention aux éclaboussures de soudure, ne jamais souder au dessus de l’électronique quand on peut faire autrement.

On passe à la préparation de la carte des ESCs : on va étamer l’ensemble des pads des ESCs et de l’alimentation. Les soudures doivent être bien brillantes. Je fais ça en dehors du châssis pour éviter les éclaboussures sur le carbone. Par précaution, je protège l’électronique avec du scotch d’électricien.
On installe la carte des ESCs dans le châssis et on peut souder les fils des moteurs. Une pince est indispensable pour cette étape : on maintient le fil moteur avec la pince sur le pad, et avec l’autre main, on pose le fer à souder sur l’ensemble jusqu’à ce que le fil étamé fusionne avec le pad. On ne se préoccupe pas de l’ordre des fils : le sens de rotation des moteurs pourra être inversé plus tard.
On passe à la pigtail XT-60. Elle peut être soudée selon différentes orientations, en fonction de la direction que prendra la pigtail pour aller vers la batterie.
Il nous reste le condensateur. Avant de le souder, on raccourcit ses pattes puis on fait une belle rallonge avec du fil AWG 20, sans oublier d’utiliser de la gaine thermo.
Pour protéger et isoler le condensateur, on peut également utiliser de la gaine thermo comme ici.
Il nous reste plus qu’à le souder sur les pads de l’alimentation.

Enfin, on nettoiera le flux de soudure avec un coton tige et un peu d’alcool isopropylique (ainsi que les éventuelles traces de colles laissées par le scotch d’électricien).

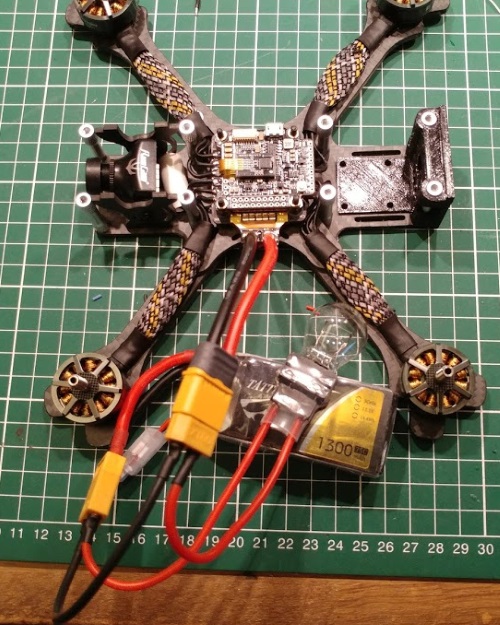
C’est le moment de faire un premier test de continuité. Tout est OK, on branche pour la première fois une lipo pour s’assurer que tout se passe bien, en prenant bien garde à utiliser un Smoke Stopper pour protéger l’électronique en cas de problème. Les ESCs démarrent bien, tout va bien ! 🙂
La FC et le reste des composants
Avant de se lancer, je recommande de connecter la FC au PC pour calibrer l’accéléromètre bien à plat, et éventuellement mettre à jour le firmware avec la dernière version. Si vous ne volez qu’en Acro, l’accéléromètre est inutile (le gyro, lui, se calibre lors de la mise sous tension du quad).
Comme pour les ESCs et les moteurs, on place les composants et on coupe les fils à la bonne taille. Prévoir de la marge pour ne pas être trop juste et pouvoir torsader les fils. Il ne reste plus qu’à les souder conformément au schéma de connexion réalisé un peu plus tôt.
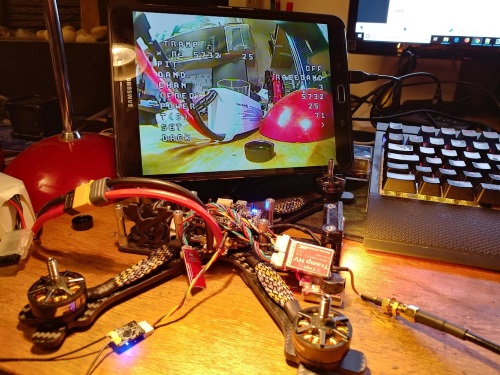
5. Vérifications
Attention ! Ne faites pas comme moi : n’alimentez surtout pas votre VTX sans y avoir branché une antenne. Heureusement je m’en suis vite rendu compte et il était réglé à faible puissance, tout va bien, il n’a pas été endommagé.
Une nouvelle fois, on fait un ultime test de conductivité et si tout va bien, on alimente le quad au travers du Smoke Stopper.
Tous les composants semblent bien alimentés !
On pourrait directement passer à la partie étanchéification…
6. Configuration
… mais avant de finaliser le montage, je préfère passer par la partie E. Configuration, pour m’assurer que tout fonctionne comme prévu :
- les moteurs tournent bien dans le sens voulu
- le signal vidéo/audio reçu dans les lunettes est propre
- la RC pilote bien les moteurs et reçoit la télémétrie
- Les LEDs et le Buzzer fonctionnent bien
- Le pilotage du VTX par la FC est fonctionnel
- L’OSD s’affiche bien
- …
7. Étanchéification
… Nous y revoilà, la configuration a été faite et tout fonctionne bien 🙂
C’est le moment pour une étape tout à fait facultative : l’étanchéification. Comme tout électronique, nos multis sont sensibles à l’humidité.
Si votre multi n’a pas été étanchéifié et a malgré tout fait un plongeon dans la flotte, tout espoir n’est pas perdu : séchez les composants et laissez-les quelques jours dans des bocaux de riz, qui absorbera l’humidité. Cette méthode n’est pas garantie, mais a tout de même fait ses preuves à de multiples reprises.
Le principe est d’appliquer du silicone liquide sur les composants sensibles qui, en séchant, laissera une fine couche isolante au-dessus des composants. Attention à ne pas en appliquer sur les éléments mécaniques comme les boutons, les connecteurs, port USB, le gyro s’il est soft mounté etc. Pour les connecteurs, on peut utiliser un produit anticorrosion.
Dans les différents tutos que l’on peut trouver, ils utilisent un produit que je n’ai pas réussi à trouver en Europe. Par contre j’ai trouvé l’équivalent chez Farnell : Flexible Silicone Coating, en plus, c’est pas cher.
Attention : les émanations de ce produit ne sont pas bonnes à respirer (xylène) : à utiliser dans un espace bien aéré.
Revenons à mon build : je ne compte pas faire un sous-marin, je me contenterai d’une étanchéification partielle. Le but est de pouvoir voler sans crainte en début de pluie, dans la brume ou le brouillard, pouvoir atterrir dans la neige ou dans l’herbe humide sans être inquiété. S’il tombe à l’eau bah… ça limitera la casse 😉
Je ne me suis pas lancé dans une étanchéification complète à cause de quelques contraintes :
- le gyro de la Kakute F7 est soft mounté, je ne peux donc pas l’enduire de silicone sans perdre une partie de l’effet recherché
- Je compte utiliser le micro de la caméra, donc je ne vais pas boucher le trou du micro de toute façon, sinon j’aurai enduit le boitier
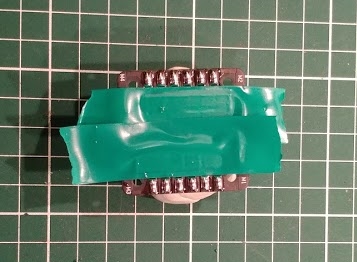
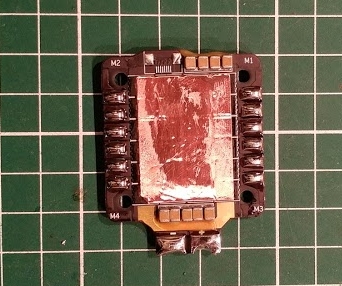
- une feuille de cuivre est collée sur les ESCs et je ne voulais pas la retirer
- J’ai la flemme de retirer la gaine thermo du buzzer et du VTX
Au final, je vais me concentrer sur la carte des ESCs, la FC, le RX et l’anneau de LEDs. Je prépare les composants pour pouvoir accéder aux 2 côtés :
J’ai appliqué le silicone liquide du mieux que j’ai pu en évitant les zones mécaniques. Une lampe à UV permet de voir où le silicone a été déposé. Sur la photo suivante, on voit très bien que je n’ai pas mis de silicone sur le centre du pad en cuivre des ESCs :
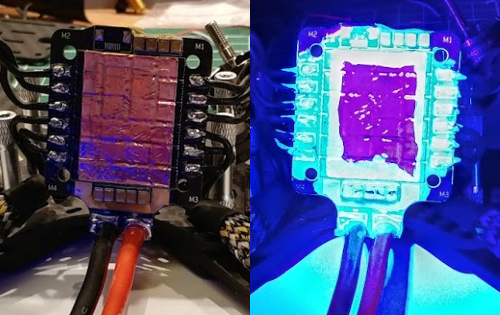
Le VTX et le buzzer sont relativement bien protégés dans leur gaine thermo, j’ai quand même ajouté un peu de silicone pour limiter les infiltrations. Je n’ai pas touché à la caméra. Je n’ai pas utilisé non plus de produit anticorrosion sur les connecteurs car ils deviennent plus « glissants » et se clipsent moins bien. Encore une fois, je ne compte pas voler dans l’humidité de manière fréquente, donc je m’en passerai.
Après un petit temps de séchage, on peut remonter le tout !
Pour compléter, voici quelques tutos sur Youtube :
- [LONG RANGE] Monter un drone étanche partie 2 – Rendre son drone étanche (au passage, la chaîne de Yann est vraiment top)
- How to Waterproof Electronics (the clean way)
- Waterproofing a drone
- How To Water Proof Your Drone! For Beginners! Will You Sink Or Swim?
8. Montage 2/2 (Finalisation)
J’ai commencé par fixer le condensateur à l’aide de 2 petits colliers de serrage :
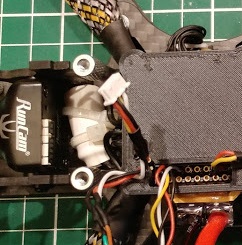
Puis on s’attaque à la stack arrière avec un premier niveau pour le RX et les fils de l’anneau de LEDs. J’ai mis de la gaine thermo autour du RX (en gardant l’accès au bouton de binding) et j’ai ajouté un peu de scotch double face pour être sûr que ça ne bouge pas. Je m’assure que les antennes sortent bien là où je le souhaite.
J’ai installé la pièce en TPU conçue précédemment pour prendre en sandwich le RX et verrouiller le tout avec des entretoises de 20mm.
Au 2ème niveau, j’installe le buzzer autonome, il rentre tout juste entre les entretoises, mais je le sécurise avec un collier de serrage.
Au troisième étage, j’installe le VTX dans son support TPU fait maison et je referme la stack avec les vis supérieures.
On passe ensuite aux antennes : elles seront guidées par un collier de serrage fixé sur le bras.
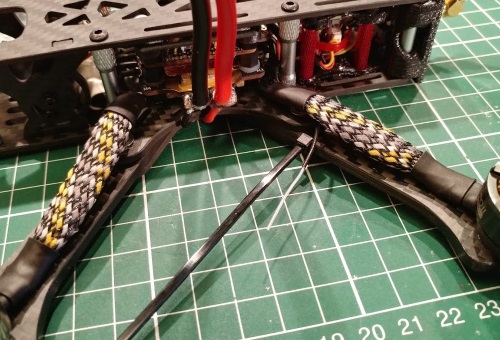
On pourrait directement mettre de la gaine thermo par dessus, mais pour faire quelque chose de plus propre, j’ai utilisé du tube pour l’antenne avec un capuchon. La partie du fil d’antenne en contact avec le châssis (sous la gaine des fils des ESCs) est protégée par de la gaine thermo, pour éviter un effet de cisaillement par frottement contre l’arrête du châssis.

On peut enfin finaliser les bras avec des colliers de serrage pour que rien ne bouge. J’ai aussi attaché la pigtail XT-60 au châssis, ce n’est pas ce qu’il y a de plus sexy, mais en cas d’arrachement de batterie, l’électronique ne sera pas emporté.
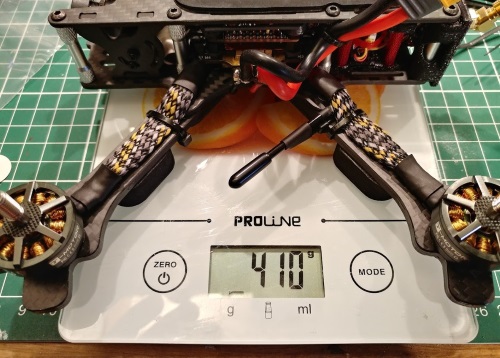
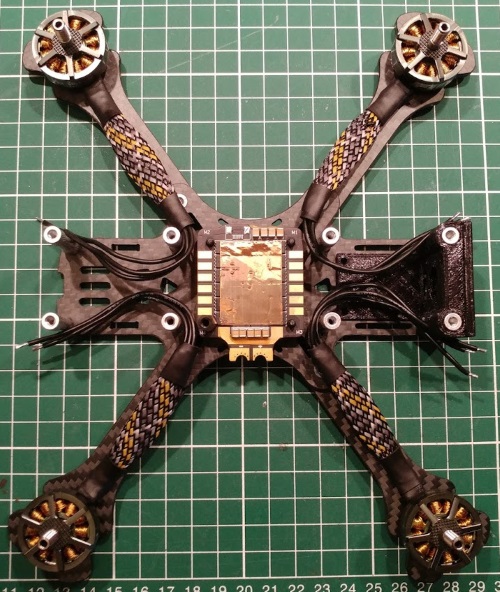
C’est un beau bébé ! Et encore, les hélices ne sont pas montées. Mais pour du freestyle ça fera l’affaire.
Et en bonus, une petite vidéo de la mise sous tension de la bête :
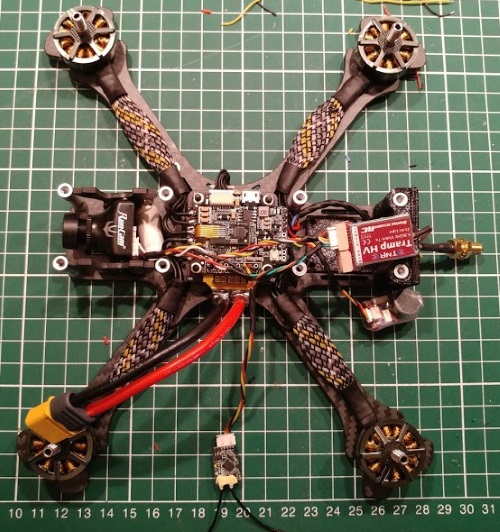
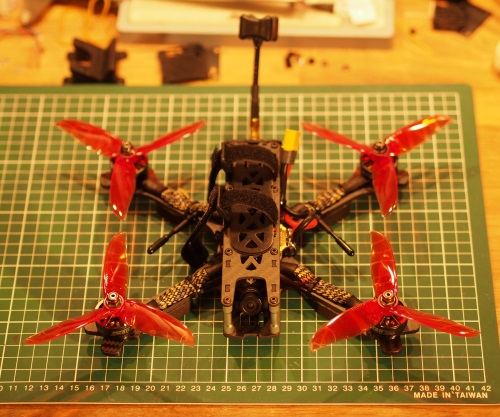
9. Photos
Et voilà le résultat 🙂




E) Configuration
Cette section sera assez synthétique, je vais expliquer les paramétrages à faire dans les grandes lignes et pour mes composants, c’est à adapter en fonction de chaque build évidemment 🙂
1. La FC
Si ce n’est pas déjà fait, on va commencer par flasher la FC pour installer la dernière version du firmware. Installez les drivers adaptés à votre FC. Pour la Kakute F4, la dernière version stable de Betaflight est la 3.5.4. Je redémarre la FC en DFU mode et j’installe la dernière version de Betaflight.
2. Le RX
Il peut être nécessaire de flasher votre RX, par exemple, si vous avez une radiocommande FrSky EU-LBT et que votre RX est une version internationale il faudra le passer en EU-LBT. Dans mon cas, je souhaite utiliser le nouveau protocole F.PORT : il permet de n’utiliser qu’un seul fil pour remonter les infos de la RC et avoir la télémétrie (au lieu d’un SBUS + S.Port par exemple).
J’ai récupéré le dernier firmware F.Port pour mon R-XSR (version 180921) et je l’ai flashé avec la Taranis X9D. Un très bon tuto de We Are FPV est accessible ici.
On peut maintenant binder le récepteur avec la radiocommande. Se reporter à la documentation de votre RX et de votre RC pour connaître la procédure.
La seconde étape consiste à configurer la FC en fonction de notre RX, pour le F.Port : Tuto FrSky FPort sous BetaFlight (We Are FPV).
Pour résumer :
- Dans l’onglet « Ports » : on active le Serial RX pour l’UART qui va bien (l’UART6 pour moi)
- Dans l’onglet « Configuration », on paramètre notre récepteur, dans mon cas je choisis « RX série » puis « FrSky FPort »
- On lance le CLI et on saisit ces 2 commandes (pour une FC F3 ou F7) :
set serialrx_halfduplex = ON
set serialrx_inverted = ON
Puis « save ». Cela permet de configurer correctement le port (j’utilise le signal inversé au niveau du connecteur du R-XSR, et non le signal non-inversé accessible via un petit pad du RX).
Ces commandes peuvent varier en fonction de votre configuration. - Activer la « TELEMETRY » dans les fonctionnalités de Betaflight
Une fois tout ça fait, il faut relancer une découverte des capteurs dans la télémétrie de la RC.
Pour finir, une vérification très importante : s’assurer que le fail safe fonctionne ! On arme le quad, on démarre les moteurs (toujours sans hélice bien sûr) et on éteint la radiocommande. Dans les secondes 2-3 secondes qui suivent, les moteurs doivent s’arrêter.
3. Le VTX
Dans l’onglet des ports de Betaflight, j’assigne à l’UART1 le périphérique « IRC Tramp » pour pouvoir piloter le VTX par la FC (via l’OSD et la RC).
Pour le moment, je règle le VTX à faible puissance (pitmode ou 25 mW) et sur une fréquence raccord avec mes lunettes.
4. La caméra FPV
J’ai utilisé la petite télécommande filaire livrée avec la Runcam Swift 2 pour la régler. J’ai désactivé tous les éléments de l’OSD (j’utiliserai celui de la FC) et j’ai appliqué les réglages recommandés dans cette vidéo.
5. Les ESCs
Tout d’abord, dans Betaflight, je choisis le protocole pour les ESCs : DSHOT1200. Je peux maintenant tester les moteurs via l’onglet « Moteurs » de Betaflight pour vérifier qu’ils tournent dans le bon sens.
Comme la télémétrie des ESCs est disponible (UART7), j’active la fonctionnalité « ESC_SENSOR » dans l’onglet « Configuration ».
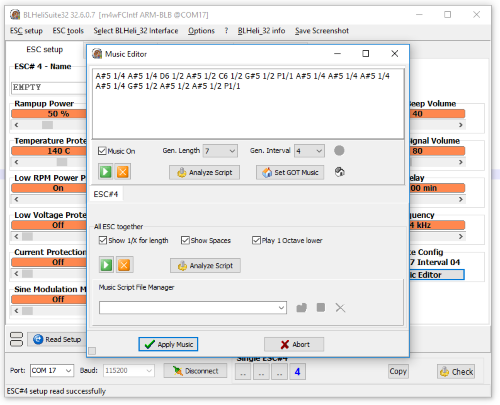
Le moteur 3 tournait dans le mauvais sens, il faut inverser son sens de rotation. Pour faire ça, il faut utiliser un autre logiciel, qui permet de configurer les ESCs au travers du port USB de la FC. Pour mes ESCs, j’utilise BLHeliSuite32. J’en profite pour flasher tous mes ESCs avec la dernière version du firmware disponible, et j’inverse le sens du moteur 3.
Dans un élan de geekerie, j’en profite pour charger une musique de démarrage à jouer par les ESCs 😉 J’ai mis la première moitié du thème de Ghostbusters, plein d’autres musiques sont dispos sur le net.
6. Buzzer
Pour le buzzer, il n’y a rien de particulier à faire, si ce n’est l’activer et choisir les alertes que l’on souhaite conserver.
7. LEDs
Il faut activer la fonctionnalité « LED_STRIP » dans les fonctionnalités de l’onglet « Configuration », ce qui débloque un nouveau menu « Bandeau LED » dans lequel je crée toutes les LEDs correspondant à mon anneau de LEDs. Je les associe à la fonction « Couleur » en fonction de la position du manche des gaz.
8. Autres paramétrages de la FC
Pour le moment, je laisse la partie PID par défaut, j’entrerai seulement mes rates habituels.
Dans l’onglet « Configuration », j’ai choisi « 16kHz » pour la fréquence de rafraîchissement du gyro et de la boucle PID. En théorie, je devrais pouvoir monter à 32/32, mais le processeur est trop limite (et il faut désactiver pas mal de truc : accéléromètre, baromètre, black box…). Bref, en 16/16 ça devrait être largement suffisant (voire 32/16).
J’ai tout de même désactivé le baromètre qui ne me sert à rien. Par contre j’ai gardé l’accéléromètre, même si je ne l’utilise pas, ça peut quand même être pratique si je fais essayer mon quad à quelqu’un en mode stabilisé.
J’ai également activé les fonctionnalités : « AIRMODE » (permanent), « OSD », « ANTI_GRAVITY » et « DYNAMIC_FILTER » (pour ce dernier, je verrai plus tard si c’est utile).
Dans l’onglet « Récepteur », je vérifie l’ordre des voies et je m’assure que je reçois bien les commandes de la RC sur les bons canaux.
Je passe ensuite à l’onglet « Modes » et je paramètres : ARM, PREARM, ANGLE, HORIZON, BEEPER. Je fais attention à caser tout ça sur 4 canaux seulement. Pour ne pas dépasser les 8 canaux au total (4 axes + 4 inters), au delà, la latence sera multipliée par 2, plus d’explications ici.
Pour terminer, je configure l’OSD avec les informations que je trouve utiles.
9. La radiocommande
Elle se tape un peu l’incruste dans ce guide, mais pour profiter de la télémétrie et configurer les PIDs ou le VTX depuis la RC, il y a quelques manipulations à prévoir. Cette partie dépend totalement de votre matériel. Pour en profiter (avec une Taranis FrSky), il faut être au minimum en version 2.2.0 de OpenTX. J’y étais, mais j’en ai profité pour passer en version 2.2.3.
Pour activer la télémétrie, il faut installer les scripts LUA pour Betaflight. Vous pouvez suivre ce tuto de Oscar Liang.
J’ai ensuite été confronté à un problème de mémoire insuffisante. Le script LUA est trop gourmand, il faut utiliser la version précompilée (LUAC). Joshua Bardwell explique tout ça ici. En résumé, il faut re-télécharger le firmware avec l’option LUAC activée et re-flasher la RC. Enfin, pour pouvoir activer le raccourci « Page » en ajoutant un « Screen » à votre modèle, il faudra supprimer le fichier « Carte SD\BF\bf.lua » et renommer le fichier « bf.luac » en « bf.lua ».
F) Le Maiden
Voici le maiden, c’est à dire le premier vol de la bête, avec les PIDs stock. Je ne ferai pas le foufou car beaucoup de nouveautés pour moi : plus de puissance, batterie sur le dessus, châssis en Wide-X, caméra plus tiltée que d’habitude…
Manque de bol, la météo était mauvaise : froid (1°), mais surtout pluie. Je n’ai fait que 2-3 lipos, mais il vole, et plutôt bien, j’ai hâte de pouvoir le tester un peu plus sérieusement ! 🙂
Edit : j’ai pu le faire voler plus que 10 minutes ce week-end, dans de meilleures conditions, voici une seconde vidéo :
Je n’ai pas pensé à enregistrer de DVR, mais bonne nouvelle : aucun parasite, même sur les gros coups de gaz 🙂
Conclusion
Nous voici rendus à la fin de ce guide, que j’ai rédigé au fur et à mesure de tout le processus de conception et de réalisation. C’était une première pour moi mais tout s’est déroulé sans accroc, je n’ai rencontré aucune grosse mauvaise surprise jusqu’au maiden.
Finalement, le point qui m’a le plus compliqué la vie, c’est la disposition des composants pour avoir quelque chose de propre. Je ne referai sans doute pas le choix d’une FC avec un gyro soft mounté : c’est censé nous faciliter la vie et finalement, ça prend de la hauteur dans la stack, ça empêche de faire une étanchéification complète mais le plus contraignant c’est qu’il faut être très vigilant à ce qu’aucun fil ne puisse venir en contact avec le gyro.
Le VTX (Tramp HV) est de très bonne qualité, mais son intégration dans le châssis n’est pas des plus pratique. Je l’avais choisi pour sa fonction NFC, or pour en profiter, il faut installer un module supplémentaire dans le châssis. Je ne l’ai finalement pas utilisé car je peux déjà régler le VTX via l’OSD et la télémétrie de la RC, c’est largement suffisant.
Pour terminer et avoir un quad au top, il faut passer par l’optimisation des PIDs. C’est un sujet assez complexe et une compétence qui s’acquière par la pratique. Ce sujet dépasse largement le périmètre de cet article.
A noter tout de même que les PIDs stocks des dernières versions de Betaflight sont en général assez corrects pour la plus part des builds et ne nécessitent que quelques ajustements pour corriger de petits défauts (propwash…). Néanmoins, voici quelques liens de très bonne qualité permettant de mieux comprendre comment cela fonctionne pour pouvoir se dépatouiller tout seul :
- Betaflight 3.5 Baseline PID Tune | NO BLACKBOX DANG IT (par Joshua Bardwell)
- Réglages PID – théorie et exemple pratique (Betaflight/Drone racer/mode acro) (par Dom, notre expert français sur le sujet, je vous recommande sa chaîne)
- Comprendre les PID 1 – Réglage du P (exemples Blackbox) – Betaflight (une série de tutos par Dom)
- Régler ses PID, la methode Damien Gans aka Black Bird FPV | PID Tuning (par Culture FPV)
- the EASY way to PID TUNE (Betaflight) (par Le Drib)
- Les filtres Betaflight et réglage d’un filtre notch (Blackbox) (par Dom)
- Guide de démarrage pour Plasmatree PID analyzer (par We Are FPV)
Ressources
Voici quelques liens vers des sites ou chaînes de grande qualité où vous pourrez trouver la réponse à pratiquement toutes vos questions :
- FR – We Are FPV : un site, une chaîne Youtube, des tests et des tutos avec une super communauté et un forum très vivant.
- FR – Culture FPV : très complémentaire à We Are FPV, et du contenu de très bonne qualité également
- FR – FPV Passion : de l’actu, des tests et de très bons tutos
- FR – La chaîne de Dom FPV : d’excellents tutos techniques très poussés sur la configuration de nos quads (PIDs, filtres…)
- US – Le site d’Oscar Liang : une bible d’informations !
- US – La chaîne de Joshua Bardwell : en anglais, mais toujours passionnant… You gonna learn something today !
- US – Rotorbuilds : Recense des milliers de builds partagés par la communauté (parfois très bien documentés), on peut filtrer par composants, idéal pour trouver de bonnes idées !
- FR – Dronebuilds : la version française de Rotorbuilds, chez We Are FPV
Il y a plein d’autres sites excellents, mais avec ceux-là, on a déjà une très bonne base pour apprendre plein de trucs et se tenir à jour 🙂
Enfin, les fichiers STLs créés pour ce build sont disponibles ici (sauf le support pour la Madcase GoPro, que je pourrai ajouter si nécessaire).
Très beau travail !! Bravo
Merci Frederic 🙂
Je te retourne le compliment, j’ai d’ailleurs ajouté FPV Passion aux ressources de la fin étant donné que plusieurs tutos sont référencés au long de l’article 🙂
(sorry for the english!)
Beautiful build! Thank you very much!
Can you provide the .stl files for your 3d printed parts? I would love to copy your design!
Merci!
Hello John,
Thank you. I have added the STL files at the end of the post. Or you can find them here :
https://labo.sitagg.com/wp-content/uploads/2019/02/TBS-SourceOne-0.2-STLs.zip
Be careful, the archive contains 2 files for the back support : one for standard standoffs (5 mm) that I have never tested, and the one I used for 6.34 mm standoffs.
Bye 😉
Hello,
Je viens de commander les pièces pour mon premier build. Après avoir rechercher sur Google: Tekko32 + TBS Source one, je suis tombé sur ton article.
C’est super chouette car j’ai commandé exactement les mêmes composants que toi sans le vouloir:
* T-moteur F40
* Stack hollibro F7 + ESC
* TBS Source One
* VTX Immersion RC
Maintenant, j’ai un super guide ULTRA détaillé pour m’aider dans l’assemblage.
Un tout grand merci, pour ton travail.. c’est super propre et ça va aider pas mal de monde :).
Salut,
Pour le coup, t’es tombé au bon endroit 🙂 Elle est top cette config tu verras. Et content que ça aide du monde 🙂
Bon montage et bons vols !
Salut j’aimerais savoir comment tu as imperméabilisé la f7? Tu es passé au plus près du softmount du gyro et sur le gyro?
Salut,
Oui, j’ai juste fait une imperméabilisation partielle, à cause du gyro softmounté (j’ai imperméabilisé autour en faisant bien attention à ne pas toucher la « mousse »).
Ok merci pour ton retour
Bonjour,
Merci pour cet article très complet.
Dans vos Stl vous avez deux fichiers pour le support des leds. L’un nommé 5mm et l’autre 6.34mm. Je ne vois de quel offset il s’agit.
En vous remerciant pour votre retour.
Bonjour,
Avec plaisir 🙂
Ces 2 dimensions correspondent à la largeur des entretoises arrière. Si vous regardez les photos, j’ai remplacé les entretoises complètement cylindrindriques par des entretoises plus large en haut et en bas, ces dernières ont un diamètre maximal de 6.34mm 🙂
Merci pour votre retour,
Cdlt.
Hello,
Merci pour ce post ultra complet, je débute, j’ai commandé mes pièces.. ça sera mon 1er drone fpv .
Je vais suivre ton guide à la lettre, certain termes me sont inconnu, mais Google est mon ami^^
Je serai surement de retour ici d’ici quelques semaines en panique ^^
Bien à toi
Lox
Salut Laurent,
Merci pour ton message et bienvenue dans le hobby 🙂
En ce moment, je manque un peu de temps pour m’occuper du blog, mais je suis très actif sur la communauté « We Are FPV ». Ils ont un super forum (ainsi qu’un blog et une chaîne Youtube), n’hésite pas à nous rejoindre là bas :
https://forum.wearefpv.fr/
A bientôt !
Jérôme
merci pour tout ses renseignement franchement merci .