J’ai prévu d’utiliser un Arduino Mega pour jouer le rôle de « moelle épinière » de mon prochain robot. C’est cette partie qui permettra l’acheminement des différents messages entre le cerveau (un mini-PC) et le corps (châssis, moteurs, capteurs) du robot.
Cette partie sera donc le carrefour de nombreux échanges entre différents types de périphériques, avec leurs contraintes (protocoles différents, performances, utilisation d’interrupts externes etc.).
Le but de ce PoC (Proof of Concept) est de démontrer que le Arduino Mega est bien capable d’assurer ce rôle. Plus précisément, il doit être capable de gérer en parallèle :
- des périphériques sur bus SPI
- des périphériques sur bus i2c
- la communication série avec un PC
- la communication avec un autre Arduino (Nano) sur le bus i2c
- le pilotage de pins digitaux
- la lecture de pins analogiques
- des encodeurs très rapides avec des interrupts externes
Et tout ça pour une emprunte mémoire supportable.
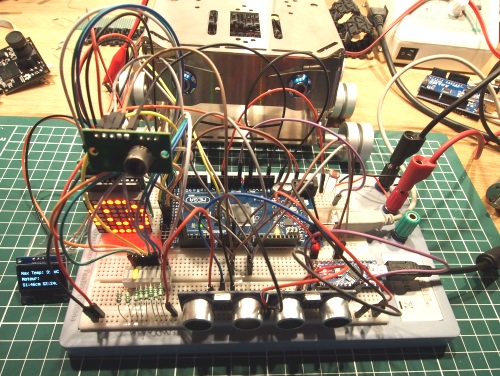
Pour ce faire, j’ai fait un petit montage composé d’un Arduino Mega, d’une matrice de LEDs (SPI), d’un moteur CC et son encodeur (les 2 pins étant attachés à des interrupts externes), un tableau de 10 LEDs (je n’en utiliserai que 8, pilotés directement par des sorties digitales + une résistance de 150 Ohms), une photorésistance (sur pin analogique), un écran OLED (i2c), un capteur thermique IR de 8 cellules (i2c), un Arduino Nano (i2c) avec 2 capteurs ultrasons.
Le schéma suivant sera plus parlant :
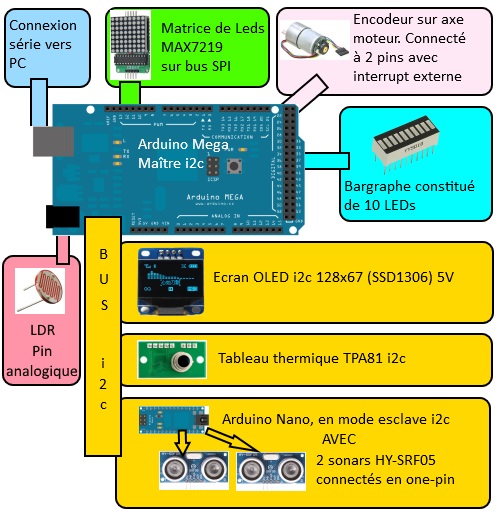
L’écran permettra d’afficher un certain nombre d’informations (température la plus élevée sur le capteur thermique, ticks moteurs, les distances relevées par les capteurs ultrasons), le tableau de 8 LEDs affichera la cellule la plus chaude détectée par le capteur thermique) et la matrice de LEDs dessinera une ampoule si une forte lumière est détectée ou un smiley si la température la plus élevée relevée par le capteur est inférieure ou égale à 50°C et un cœur si elle les dépasse.
Pour mesurer l’intensité lumineuse, on utilisera une photorésistance (1-10 KOhms) : sa résistance varie en fonction du niveau lumineux. Un simple pont diviseur de tension (avec une résistance de 10 KOhms) nous permettra d’obtenir des variations de tension sur le port analogique que l’on pourra alors facilement mesurer. Un tuto ici.
L’Arduino Mega est le maître du bus i2c. Pour pouvoir communiquer avec un autre Arduino (Nano ici), ce dernier doit être utilisé en tant qu’esclave sur le bus i2c. Tout ce qu’il faut savoir est ici.
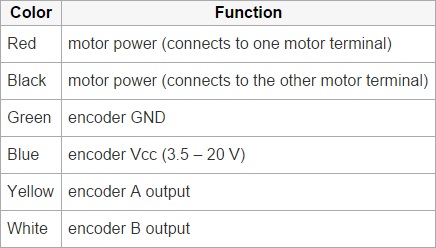
Les détails concernant le moteur (et son encodeur) utilisé est disponible ici. Et voici le détail des connexions :
Les librairies utilisées sont les suivantes :
- U8glib (pour l’écran OLED)
- Encoder (pour l’encodeur)
- LedControl (pour la matrice de LEDs)
- Wire (pour l’i2c)
- NewPing (pour les sonars connectées au Nano)
Côté Arduino Mega, on est confortable, le programme occupe 7% du stockage et utilise 11% de la mémoire. Pour le Nano, la question ne se pose même pas : il ne fera que relever les mesures de capteurs ultrasons.
Lors des premiers essais, des problèmes de performances sont apparus et on pouvait observer une légère latence du système, de l’ordre des 200ms à vue de nez. En pratique, si j’allume la lumière sur la photorésistance, la matrice de LEDs affiche l’ampoule 200ms plus tard. Ce n’est pas énorme, mais ça se sent et ça pourrait poser des problèmes, pour la gestion des obstacles par exemple.
Je me suis vite aperçu que cela venait du rafraîchissement de l’écran OLED : à chaque tour de la boucle principale du programme, l’écran était entièrement redessiné. Je n’ai pas besoin de le mettre à jour si souvent, il suffirait de le faire une fois toutes les 200ms pour avoir un affichage assez fluide (sachant que pour mon utilisation, je pourrais même le rafraîchir toutes les secondes seulement).
Et c’est très facile à faire, grâce à la fonction millis(). Elle renvoie le nombre de millisecondes écoulées depuis que le Arduino est sous tension (le compteur revient à 0 après environ 50 jours de fonctionnement). A partir de là, il suffit de vérifier à chaque tour de la boucle principale qu’au moins 200ms se sont écoulées depuis le dernier rafraîchissement de l’écran. Si ce n’est pas le cas, on ne le redessine.
Cette petite astuce a réglé les problèmes de latence, l’Arduino Mega pilote le tout à merveille, la démo en vidéo :
Code source pour l’Arduino MEGA
Code source pour l’Arduino Nano