La Pixy MCUcam est une caméra intelligente, elle est capable de reconnaître et suivre des objets grâce à leur couleur. Elle peut apprendre jusqu’à 7 signatures et est très performante (50 analyses d’image par seconde). Elle propose un large panel d’interfaces (i2c, série, SPI, USB…). La page du produit est ici (projet financé via Kickstarter).
Elle est dispo chez Lextronic (entre autres) à 69€. Ça peut sembler cher, mais vu ce qu’elle propose, ça me paraît très raisonnable.
Sur PC, on peut la connecter via USB et utiliser un logiciel pour la tester et la configurer. Sur la vidéo suivante, elle traque 2 objets (précédemment appris).
Comme on peut le voir, la camera sait identifier sur l’image la présence de certains objets. A chaque analyse elle renvoie les coordonnées et les tailles des objets identifiés.
Les performances sont vraiment impressionnantes. Il y a par contre des conditions à respecter : le capteur est basé sur un algorithme de filtrage des couleurs (il analyse la teinte et la saturation de chaque pixel). Les conditions d’éclairage peuvent avoir un impact sur l’efficacité du capteur, ça reste à tester plus en profondeur. De nombreuses options sont disponibles pour ajuster les conditions de reconnaissance. C’est avec des couleurs vives que le capteur marche le mieux.
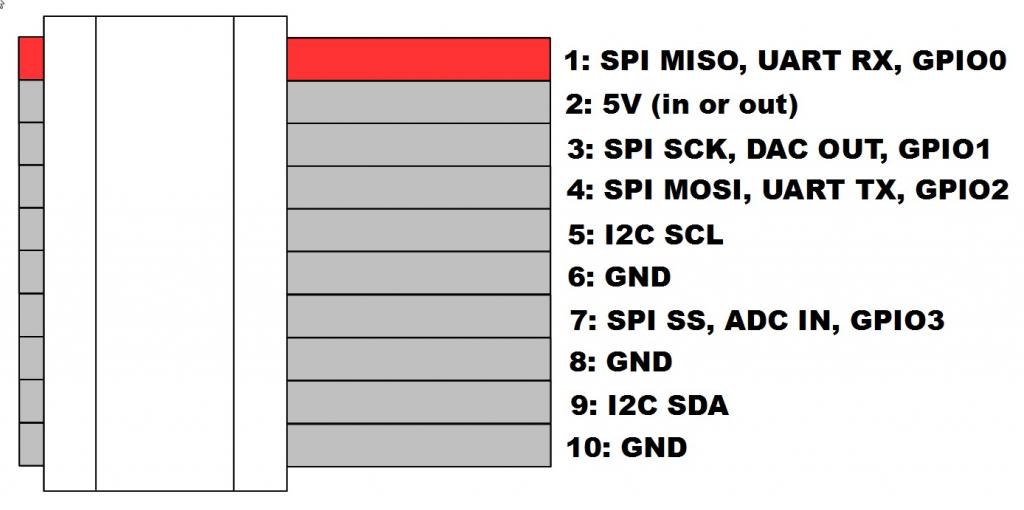
Si l’application PC est pratique pour les tests et la configuration, c’est avec un Arduino que je l’interfacerai. La camera dispose d’un port pour une nappe de 10 fils. Le câble livré avec n’en contient que 6 et est prévu pour une connexion via SPI. Je compte l’utiliser en i2c, il faudra donc prévoir un nouveau câble. Voici le détail des connexions sur le port de la Pixy CMUcam5 :
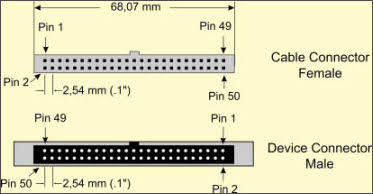
Ci-dessous, l’ordre des pins pour les connecteurs mâles et femelles des nappes :
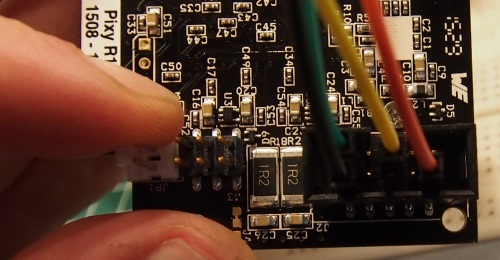
Je ferai un câble spécifique pour la connexion i2c, en attendant j’utilise simplement des câbles de prototypage.
Et voici la démo (fournie en exemple avec la librairie Arduino) en i2c :
A chaque analyse, le capteur renvoie la liste des signatures détectées (sig), les coordonnées (x,y) et la taille en pixel (width/height):
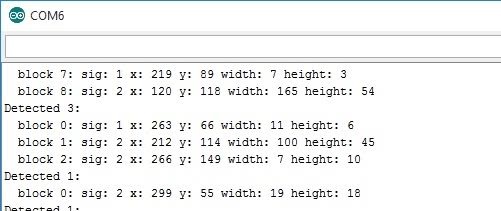
On voit qu’il y a un peu de bruit, il faudra trouver le moyen de filtrer tout ça. Mais les possibilités de ce capteur sont immenses.
Le code source est ici (et provient des exemples de la librairie fournie pour Arduino, je n’ai rien inventé).
Je compte notamment l’utiliser pour mettre en place des algos de SLAM (Simultaneous Localization And Mapping, soit en français: cartographie et localisation simultanées).
L’idée est d’apprendre au capteur un certain nombre d’objets qui serviront de balises de repérage. Quand le capteur identifiera un marqueur, le robot pourra en déduire la pièce dans laquelle il se trouve. Encore mieux, grâce à la taille retournée par le capteur, il pourra estimer la distance qui le sépare de ce marqueur. Le robot saura que sa position est un point sur un cercle de rayon X autour du capteur. Enfin, grâce à une boussole, il saura identifier précisément ce point !
Ça c’est la théorie, on verra la pratique plus tard 🙂