De retour après une longue absence. Mon système Ambilight a bien avancé, bien qu’il ne soit pas terminé, l’essentiel y est pour une première démo ! Je le poste donc tel quel parce que je vais me lancer sur autre chose ! Le détail des étapes précédentes (électronique, impression du boitier, intégration…) est disponibles dans les articles précédents).
Au menu :
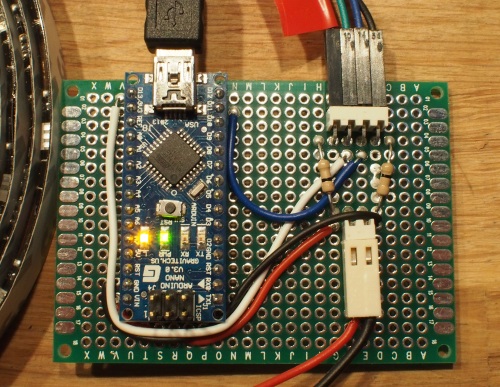
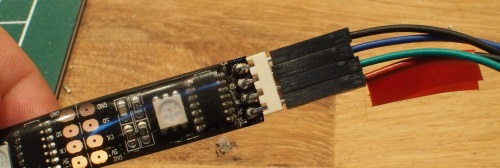
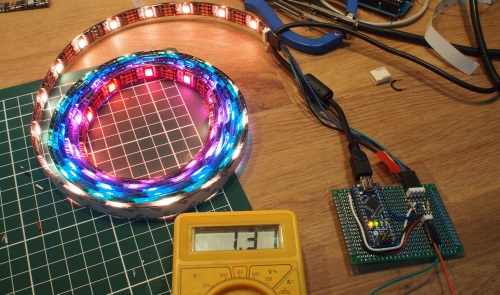
- Un logiciel permettant de piloter l’Arduino nano, qui lui-même pilote le ruban de LEDs
- Le logiciel se lance au démarrage de Windows et se charge dans la barre de notifications pour un accès rapide
![]()
- Quand on clique sur l’icone, 3 modes sont disponibles :
- Ambiance, qui permet de définir une couleur fixe ou une animation de couleurs
- Ecran, pour analyser la couleur aux bords de l’écran et la transmettre aux LEDs associées (3 méthodes d’analyse sont disponibles : GDI, DirectX 9 et DirectX 11, la première étant la plus stable mais la moins performante sur les films par exemples)
- Son, pour analyser le son de l’ordinateur et animer les LEDs en conséquence (ce mode est pour l’instant très expérimental, il ne se base que sur le niveau sonore). J’ai utilisé la librairie NAudio.
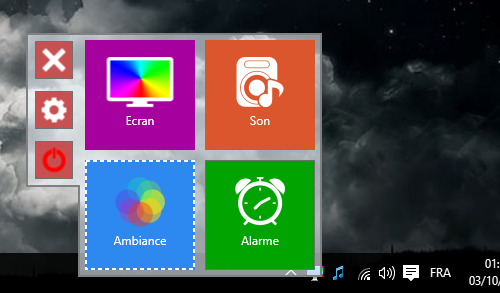
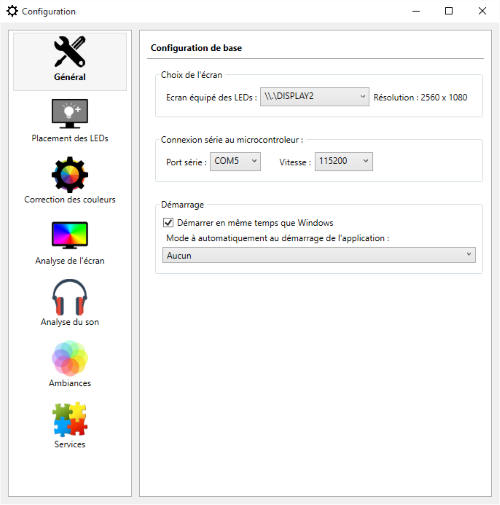
- Le bouton « Configuration » permet d’accéder à de nombreux paramétrages, à commencer par le choix de l’écran équipé du ruban de LEDs, la configuration de la communication avec l’Arduino et le mode de démarrage du logiciel.
- Un écran spécifique est disponible pour permettre un placement facile des LEDs (on peut en ajouter, en supprimer, les déplacer, définir la surface de couverture et d’analyse etc.)
- D’autres options de configuration permettent de calibrer la puissance des LEDs, corriger les couleurs etc.
Et pour illustrer le tout, rien de tel qu’une vidéo :
Quelques remarques :
- Tout n’est pas terminé :
- L’analyse de l’écran marche bien, mais dans les films, la moyenne des couleurs tend souvent vers des gris, l’algo d’identification de la couleur dominante d’une zone est à ajuster.
- La méthode de capture d’écran classique (GDI) induit de micro-ralentissements, presque imperceptibles, mais qui restent présents.
- L’utilisation de DirectX (9 ou 11) fonctionne très bien pour les vidéos, mais posent quelques autres problèmes (lorsque de la souris bouge par exemple)
- La partie analyse du son est une ébauche, il est possible d’aller beaucoup plus loin : analyser séparément les canaux gauche/droite, analyser le spectre (aigus, médiums, graves) au lieu de se baser sur le volume etc.
- Exposition d’un service pour que des applications tiers puissent piloter les LEDs
- Ajout de modules de notifications (e-mails, facebook etc.)
- Mon Arduino Nano vient de Chine et utilise vraisemblablement une puce FTDI « not genuine ». L’année dernière FTDI a déclenché un petit scandale en publiant un driver qui modifiait le PID des puces contrefaites (le driver a depuis été supprimé de Windows Update). Bref, si vous êtes confrontés à un problème de communication avec votre Arduino, vous pouvez jeter un oeil ici (plus d’infos en vidéo ici, ici ou encore là).