Voler… telle est la promesse du vol en immersion ou FPV (First Person View), rien que ça ! 😉
 Le trio du FPV : quad, lunettes et radio !
Le trio du FPV : quad, lunettes et radio !
Avec la démocratisation des « drones de loisirs », c’est devenu une activité relativement accessible et abordable (ça reste un loisir qui peut vite devenir cher 😉 ). Le terme « drone » étant plutôt destiné au domaine militaire, je ne l’utiliserai plus dans la suite de l’article. Plus précisément, on parlera de multirotor (souvent quadrirotor ou quadcopter) ou de quad, car c’est ce que j’ai choisi pour débuter.
A noter que ce billet s’adresse aux débutants absolus. Une suite, beaucoup plus avancée, est disponible ici (et considère que les notions abordées dans ce premier article sont acquises).
Le principe est simple : un aéronef (ici, un multirotor) équipé d’une caméra retourne le flux vidéo au pilote (via un masque, des lunettes ou un écran) et ce dernier peut ainsi piloter le multirotor avec sa radiocommande comme s’il était à l’intérieur.
Rien de tel qu’une démo en vidéo (le mec est trèèèèès bon) :
Une vidéo des mes premiers vols est dispo plus bas.
Ce hobby réunit plein de choses : électronique, modélisme, sensations fortes, réflexes, concentration, technique, fun et bien sûr la possibilité de réaliser de belles prises de vue !
Il existe des solutions clés en main pour découvrir ce monde à des prix très contenus, mais il s’agit davantage de gadgets/jouets qui ne permettront pas d’évoluer :

Pour aller plus loin, il va falloir prendre une grande inspiration et plonger la tête la première dans cet univers. Ce n’est pas si compliqué, mais c’est très dense, il y a beaucoup de choses à savoir, et quand j’ai commencé à m’y intéresser, je ne savais pas par où commencer. Heureusement, il y a énormément de passionnés et les ressources sur Internet sont considérables ! Bonne nouvelle pour les anglophobes : la communauté française est très bien représentée et on peut trouver tout ce qu’il faut dans notre belle langue.
Je vais partager ici ce que j’ai appris et quelle a été ma démarche jusqu’à mon premier vol en FPV. Ça en aidera peut-être à démarrer dans ce hobby qui peut faire peur au premier abord.
Sommaire
- La sécurité et le respect
- L’utilisation
- Les composants
- La radiocommande
- Axes et modes de vol
- Simulateurs
- Les nano-racers
- Le contrôleur de vol : installation et paramétrage
- La vision FPV
- Premiers vols
- Passage à la taille au-dessus !
- Liens utiles
On va commencer par ça, ça sera fait. On parle de faire voler des machines dans les airs : en cas de chute, elles peuvent faire des dégâts mais surtout causer des blessures graves. Il est indispensable de configurer les différents « failsafe » au niveau du multirotor : en général, on fera en sorte qu’en cas perte de signal les moteurs se coupent. Le multirotor tombera mais ses hélices ne blesseront personne et il ne risque pas de prendre le large (le « flyaway » est un grand classique de la perte de multirotor).
Ces machines font du bruit et peuvent filmer, ils représenteront facilement une gène pour des gens venus pique-niquer tranquillement, on fera attention à ne pas les déranger.
Il y a ensuite la législation et les les zones de vol autorisées. Un drone de loisir ne nécessite pas d’immatriculation, formation ou « permis » s’il fait moins de 800 grammes. Il y a des hauteurs de vols à respecter, de nombreuses zones sont interdites (agglomérations, proximité de routes ou aérodromes, sites sensibles…).
Cette petite vidéo de la DGAC (Direction Générale de l’Aviation Civile) illustre ces principes de base :
Le site Drone-Spot permet de vérifier les règles de vol pour un site donné (une application pour smartphone existe et est bien pratique).
Un mot sur le signal vidéo : en France, la puissance d’émission est tolérée jusqu’à 25 mW sur la bande de 5.8Ghz (de 5725 MHz à 5875 MHz ). En cas de vol en immersion, il faut être accompagné d’une seconde personne (pour garder un œil sur le multirotor et l’environnement du pilote).
Enfin, en terme de manipulations : lorsque vous travaillez sur votre drone (bricolage, configuration…), retirez toujours les hélices : un démarrage intempestif et vos doigts le regretteront ! Attention également à ne jamais mettre sous tension un émetteur (pour la vidéo ou la radio-commande) sans son antenne de connectée, le composant pourrait griller.
Avant de se lancer, il convient de savoir ce que l’on souhaite faire. Dans le domaine du FPV, je vois essentiellement 3 « cas d’usages » :
- La prise de vue (photo/vidéo) : le but est de produire de belles images, stables. Dans ce cas on s’orientera vers des drones assez volumineux, stabilisés, avec une bonne autonomie et une caméra HD de qualité (voir un réflexe sur nacelle).
- La course (FPV racing) : on privilégiera des racers rapides, maniables et le plus léger possible
- Le freestyle : ici il s’agit de faire des figures, de la voltige !
En tant que débutant, je n’ai pas d’ambitions folles, simplement de m’amuser et apprendre à piloter, dans un premier temps en vol libre. J’aime beaucoup la photo et les beaux paysages, mais ce que je cherche, c’est plutôt les sensations ! C’est pourquoi je ne m’intéresserai qu’au cas du FPV racing et au Freestyle… ça tombe bien, ils sont assez proches, et pour débuter un racer polyvalent (hybride Racing/Freestyle) sera parfait.
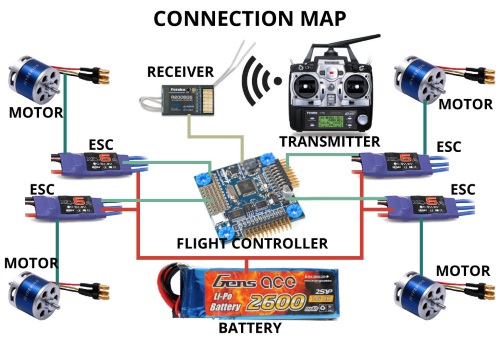
Globalement, dans un multirotor, nous retrouvons généralement les composants suivants :
- Une radiocommande
- Une batterie de type Li-Po (de 1 à 6 cellules (1S, 2S, 3S…), une cellule classique faisant 4.2V pleinement chargée)
- Une PDB (Power Distribution Board) : carte qui reçoit le courant de la batterie et le distribue vers les autres composants
- Une carte de vol, ou FC (Flight Controller) : c’est le cerveau du multirotor qui pilote tout le reste
- Des moteurs : souvent de type « brushless » (sans balais), mais parfois de type « brushed » sur les nano multirotor
- Des ESC (Electric Speed Control) : reçoit les directives de la FC et ajuste la vitesse du moteur en conséquence. Il y a un ESC par moteur.
- Un récepteur radio (RX) : il reçoit les ordres de la radiocommande et les transmet à la FC
- Une caméra FPV, qui renvoie un signal analogique afin de minimiser la latence
- Un module OSD (On Screen Display) : récupère le flux vidéo de la caméra FPV et l’enrichit avec d’autres informations (altitude, niveau de la batterie, mode de vol…)
- Un émetteur vidéo (VTX) : envoie le flux vidéo (analogique) de la caméra FPV à un ou plusieurs récepteurs (lunettes, écrans…)
- Souvent, une caméra HD est ajoutée pour disposer d’un joli signal numérique dépourvu d’interférence et enregistrer le vol. Parfois, un DVR, situé soit sur les lunettes, soit sur le multirotor peut enregistrer directement le signal de la caméra FPV, mais la qualité sera limitée.
- Un récepteur vidéo : lunettes (un écran par œil), masque (un seul grand écran), simple moniteur…
- Bonus : LEDs, GPS, buzzer (presque indispensable pour retrouver facilement son quad en cas de crash)…
Voilà pour les grandes lignes. A savoir que certains éléments sont parfois regroupés : des cartes qui embarquent les 4 ESC en 1, d’autres qui combinent PDB, FC et OSD, ESC et PDB etc… Sur les multirotor « nano », une seule carte regroupe le tout.
Ci-dessous un exemple de schéma simplifié de multirotor.
La radiocommande mérite son petit « chapitre » : dès le début, il va falloir faire des choix importants qui nous accompagneront pendant longtemps. Il y aurait énormément de choses à dire (programmable/non-programmable, nombre de voies, protocoles…), mais d’autres sites le font déjà beaucoup mieux que je ne le ferais.
Premier choix : le protocole entre la radio et le RX. Ici on doit choisir entre :
- DSM2/DSMX
- FlySky : pas cher, les multirotors RTF (Ready To Fly) sont souvent vendus avec
- FrSky : reconnu pour sa qualité/fiabilité
Ce choix est important car il définit le protocole entre la radiocommande et le récepteur embarqué par le quad. Si vous choisissez une radio FrSky, tous vos drones devront donc avoir un récepteur FrSky. Ici, je recommanderais FrSky pour sa fiabilité éprouvée et ses radiocommandes de qualité très répandues dans le monde du FPV, on y reviendra.
Second choix : le mode de pilotage
Il y a 4 modes de pilotage (Mode 1 à 4). Le mode définit le rôle de chaque stick/axe de la radiocommande. Une fois que l’on a appris dans un mode, il est très difficile d’en changer. Historiquement (et pour des raisons techniques), en France, le Mode 1 était privilégié en Club (gaz à droite), alors que le mode 2 l’était dans le reste du monde (gaz à gauche). Aujourd’hui, même en France, les nouvelles générations démarrent souvent en mode 2.
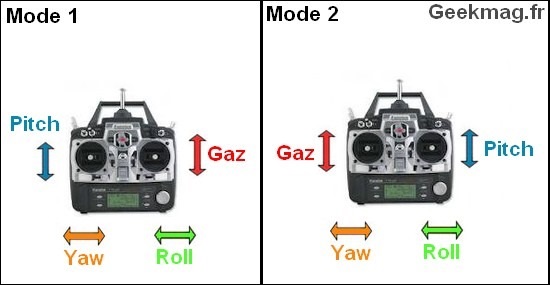
Ma recommandation, à moins que vos amis ne volent en Mode 1 ou que vous soyez dans un Club où les gens sont en Mode 1, choisissez le Mode 2.
Venons-en à la radiocommande en elle-même. Elle vous accompagnera un bon moment, c’est un élément sur lequel il ne faut pas hésiter à investir. De plus, ça se revend plutôt bien d’occasion. Après avoir fait le tour de plusieurs forums, sites, tests, vidéos… la marque qui ressort tout le temps : Taranis ! Ils font des radiocommandes programmables (FrSky) de qualité qui tourne sur un firmware OpenSource (OpenTX). J’ai opté pour le modèle de référence, la Taranis X9D Plus, pour environ 200-220€.

Sa petite sœur, la Taranis Q X7 est également un très bon choix, beaucoup plus abordable (on peut la trouver à 80-100€ chez Banggood et autour de 120€ en France). Elle dispose du même logiciel que sa grande sœur et à part l’absence de batterie et 2 switchs de moins, elle n’a pas grand-chose à lui envier.

Si vous venez du monde du gaming, alors un autre modèle pourrait vous intéresser, la Taranis X-Lite, qui s’approche d’une manette de Playstation et moins encombrant.

Ces 2 radiocommandes peuvent se brancher sur PC, pour les mises à jour d’une part, mais aussi en tant que contrôleur de jeu, et ça, c’est un plus énorme pour débuter… on y reviendra.
Il y a une communauté FrSky Taranis en France très active. Tous les tutoriaux sont indexés à cette adresse. Pour démarrer, ces 2 petites vidéos sont plus faciles d’accès que de longs tutoriaux :
Le site officiel d’Open TX, c’est par ici. On y trouvera notamment Open TX Companion, le logiciel qui permet de configurer la radio ainsi que les fichiers à mettre sur la carte SD si vous souhaitez profiter des alertes vocales (il est aussi possible d’y déposer des images pour les différents profils).
Un guide de démarrage rapide est disponible ici. Attention, sur ce lien la radio est configurée en « Mode 1 », il faudra passer en « Mode 2 » (sauf si vous souhaitez rester en « Mode 1 »), et pour l’ordre des voies, choisir « GAPD ».
Une fois la radiocommande sauvegardée, mise à jour avec le dernier firmware et configurée, on pourra la redémarrer, entrer dans la configuration pour y régler la date, l’heure, la langue des voix, le mode de pilotage etc. sans oublier de calibrer les sticks et autres variateurs. Enfin, il ne reste plus qu’à créer un premier profil (le principe est d’avoir un profil par drone que vous souhaitez piloter avec la radio).
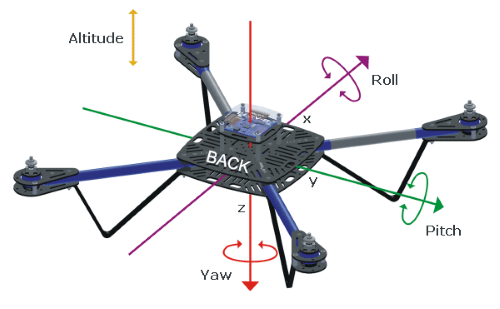
Les 2 sticks de la radiocommande permettent d’agir sur le racer selon 4 axes :
- Les gaz (Throttle) : vitesse des moteurs, permet de monter ou descendre
- Le lacet (Yaw) : rotation sur soi-même, en restant à plat
- Le tangage (Pitch) : mouvement d’oscillation d’avant en arrière (avancer, reculer, looping…)
- Le roulis (Roll) : permet de pencher à gauche ou à droite (voire de faire des tonneaux)
Un mot dès maintenant sur les modes de vol. La plupart des quads vous proposeront plusieurs modes de vol :
- Acro : par défaut, si rien n’est sélectionné, le racer est en mode « Acro », c’est à dire qu’il n’y a aucune assistance au pilotage. En général, on active également l’Airmode, c’est option permet de garder le contrôle du quad, même quand les gaz sont au minimum, pratiquement indispensable en freestyle. Quand l’airmode n’est pas disponible, on obtiendra un résultat semblable en conservant toujours un filet de gaz minimum.
- Angle : à l’inverse du mode « Acro » c’est le mode avec le plus d’assistance. Non seulement il y a une stabilisation automatique lorsque l’’on relâche le pitch/roll, mais ces derniers sont également limités pour éviter les accidents.
- Horizon : ce mode est un compromis entre Angle et Acro. il y a toujours la stabilisation mais les limites sont supprimées lorsque qu’on pousse le stick aux extrêmes. Il est donc possible de faire des rolls ou des flips.
Le but du jeu est de passer le plus rapidement possible en mode Acro : le multirotor sera beaucoup plus agile, réactif et il ne luttera pas en permanence contre les directives du pilote pour essayer de se remettre à plat. Cela demande beaucoup d’entrainement et les accidents arriveront dans 95% des cas en mode Acro. Mais c’est le prix de la liberté 😉
Il fut une époque où pour apprendre, il fallait voler, et donc casser beaucoup de matériel. Aujourd’hui nous avons la chance de pouvoir nous entraîner sur des simulateurs ! S’entraîner 10 heures en mode Acro sur simulateur c’est : 0 € de casse, pas de perte de temps à aller ramasser le multirotor, changer les batteries etc. Ça permet aussi de tenter des choses que l’on oserait même pas imaginer dans la réalité.
Les 2 radios Taranis évoquées plus haut sont compatibles avec ces simulateurs ! Certains casques ou lunettes peuvent également se connecter au PC.
Avant d’investir quoique ce soit, il est aussi possible de tester ces simulateurs avec une manette type X-Box ou PS3-4. On utilisera les 2 sticks en guise de commandes. Les sensations ne seront pas tout à fait les mêmes qu’avec une vraie radio (à commencer par le stick des gaz qui s’auto-centre), mais ça donne un premier aperçu. J’ai utilisé une manette pendant 2-3 jours avant de recevoir ma Taranis.
Le simulateur est aussi un bon moyen de garder la main lorsque qu’il ne fait pas beau, qu’on manque de temps ou que l’on souhaite travailler certaines figures.
L’offre en terme de simulateur s’est bien étoffée, j’en ai testé quelques uns qui fonctionnaient très bien :
- Velocidrone : pour un coût d’une vingtaine d’euros, ce simulateur est mon préféré et celui que j’utilise aujourd’hui le plus. Il s’approche très fortement des sensations réelles.
- Liftoff : disponible via la plateforme Steam pour 20€. Probablement le plus utilisé, pas mal de cartes, différents modes (Freefly, Freestyle, Racing…), des tutoriaux basiques, modes multijoueurs et il est beau. Il permet aussi de faire du vol à vue.
- DRL (Drone Racing League) : idem, 20€ sur Steam. C’est le premier que j’avais utilisé parce qu’il était encore gratuit (je l’ai tout de même acheté quand il est passé en payant). Les graphismes sont aussi très beaux, avec un look un peu plus arcade peut-être. Il joue dans la même cour que Liftoff mais là où il excelle par rapport à la concurrence, c’est sur les tutoriaux : ils sont nombreux et très très bien faits. Il reprend aussi les vrais circuits de la DRL.
- FPV Freerider : très répandu car il a longtemps été gratuit, aujourd’hui il est à $5 (une démo est cependant disponible). Je ne l’ai pas testé sur PC (et sur smartphone c’était ingérable sans manette 😉 ).
- Nano Play (Alpha) : J’ai hésité à le mentionner car en cours de développement, mais il a le mérite d’être gratuit et prometteur. C’est un simulateur de nano racer. Il est loin de disposer de toutes les fonctionnalités avancées de ses concurrents (pour le moment), mais il très beau (il tourne sur Unreal Engine).
En tant que novice, je ne saurais dire lequel est le plus réaliste, mais je trouve que DRM et Liftoff sont les plus aboutis/complets. Un point important à vérifier avant d’investir : s’assurer que sa radiocommande est bien supportée ! Certains ne gèrent que les Taranis.
Concernant les prix, franchement, c’est cadeau, même à 20€ ! Un jeux vidéo coûte facilement plus de 50€. Et quand on voit les progrès que l’on peut faire grâce à ces simulateurs et la casse évitée (qui représente bien plus de 20€), il ne faut pas hésiter.
Une petite vidéo de Liftoff en freefly, pour donner un rapide aperçu (faites abstraction du pilotage pourri 😉 ) :
Après quelques heures de simulateur, les tutoriaux sont terminés, on a les principes de base, on commence un peu à se débrouiller mais surtout, on a envie d’appliquer tout ça dans la réalité.
Bien sûr, on peut acheter/monter son quad et se lancer. Personnellement, je préfère démarrer en limitant la casse et j’ai investi dans un « nano racer », un tout petit multirotor, qui coûte entre 50 et 70€. Ils ont l’avantage d’être solides, faciles à réparer, utilisables en intérieur et permettent de découvrir de premières sensations à moindre coût. Inconvénients : ils n’ont pas la stabilité ni la puissance des multis « classiques » et sont très sensibles en cas de vent.
J’ai opté pour le Eachine QX95 :

Quelques modifications : remplacement des hélices par des Walkera, ajout de protections pour les hélices, ajout d’un strap et d’un velcro pour bien fixer les batteries et surtout ajout d’un buzzer. Ces petites bêtes sont vraiment minuscules, et quand elles chutent au milieu d’un champ, on est bien content d’avoir un buzzer pour les retrouver 😉
Ce nano est pas mal, mais une nouvelle version est disponible : la QX95S, elle apporte son lot d’améliorations : buzzer, une antenne linéaire (c’était l’élément le plus fragile), un vrai support caméra et en bonus, un OSD !
J’ai aussi commandé un QX65, encore plus petit, mais qui semble plus robuste, idéal pour voler en intérieur, mais qui se défend aussi en extérieur comme on peut le voir sur cette vidéo.
8. Le contrôleur de vol : installation et paramétrage
La FC héberge un logiciel qui est responsable de la gestion du multirotor. Elle reçoit des informations en entrée (directives de la radiocommande via le RX, infos des capteurs comme le gyroscope, retour des ESC…), les analyses et déclenche des actions en conséquence (essentiellement liées au pilotage des moteurs via les ESC).
Ce logiciel qui décrit le comportement d’un multirotor est appelé « firmware ». Une FC est compatible avec certains firmwares (ou inversement, un firmware est adapté à un ensemble restreint de FC). Les plus connus étant CleanFlight/BetaFlight, KISS, RaceFlight, ArduPilot, LibrePilot/OpenPilot… Pour la suite, on va se concentrer sur CleanFlight/BetaFlight. C’est un firmware Open Source qui est très populaire (et accompagne notamment mon QX95).
BetaFlight est un « fork » de CleanFlight, c’est à dire qu’ils partagent une base commune mais qu’ils évoluent maintenant chacun de leur côté. CleanFlight étant lui-même un fork de BaseFlight. Aujourd’hui, BetaFlight est la référence, il est considéré comme plus avancé, plus fiable et mieux maintenu.
Le QX95 était livré sous CleanFlight, je l’ai donc passé sous BetaFlight en « flashant » la FC. Pour flasher puis ensuite configurer la FC, il faut passer par un logiciel qui porte le même nom que le firmware. Des applications sont disponibles sous Chrome, mais je préfère passer par des applications lourdes.
Pour BetaFlight Configurator, c’est disponible ici pour Windows, Mac et Linux. Pour CleanFlight Configurator, c’est par ici que ça se passe. Attention, les versions des configurateurs peuvent être capricieuses en cas de grosse différence avec la version du firmware installé sur votre FC.
Ces configurateurs permettent d’agir de 3 façons différentes avec la FC :
- pour flasher le firmware de la FC
- pour paramétrer la FC via une ligne de commande (CLI)
- pour paramétrer la FC via une interface graphique avancée
Voici la démarche pour flasher le firmware du QX95 :
- Démarrer en boot mode en connectant les 2 pads marqués « boot » sur la carte. Il suffit d’établir le contact au moment de brancher l’USB, seule la LED rouge doit rester allumée (pas de bleu).
- Installer les drivers de la carte (utiliser Zadig, lister les périphs) (STM32 pour le QX95) (la FC DOIT être en « boot mode »)
- Dans CleanFlight/BetaFlight le port devrait être remplacé par « DFU » (Device Firmware Update) parce que l’on est dans le bootloader
- Chercher le Firmware qui va bien, éventuellement choisir d’effacer la configuration actuelle et définir la vitesse manuellement
- On peut à nouveau se connecter via le port COM pour configurer la FC
Une fois connecté à la FC, on peut lancer des commandes via le client. Les principales à connaître sont les suivantes :
- version : indiquer la version en cours
- status : retourne un certain nombre d’informations utiles
- dump : export la config
- save : restaure un backup (préalablement copié/collé dans le CLI)
- diff all : affiche les modifications par rapport à la conf par défaut
- exit : exit
- dfu (ou bl sur les nouvelles versions) : redémarre en mode « boot loader » (pas toujours disponible)
La commande « dump » est une bonne pratique à garder en tête pour sauvegarder la configuration d’une FC avant toute modification. La commande « save » permet d’appliquer toute une configuration sauvegardée.
Enfin, on pourra se déplacer dans les différents menus pour configurer la FC de manière ergonomique. Je ne vais pas entrer dans les détails ici, il existe de nombreux tutoriaux qui expliquent comment utiliser BetaFlight Configurator, notamment cette vidéo de Culture FPV très complète et sur une version récente de BetaFlight.
Une remarque cependant sur l’onglet « PID tuning ». C’est celui-ci qui va vous permettre d’ajuster le comportement de votre multirotor. PID : Proportionnal, Integral, Derivative. On y trouve aussi le réglage de l’expo et des rates. Pour modifier tout ça, soit on est bon en maths/physique, soit on est un pilote expérimenté 😉 Comme je suis ni l’un ni l’autre, je vous conseille un peu de lecture., une vidéo sur les PIDs (cet article accompagné d’une vidéo de conseils pratiques est super aussi) et une autre sur les rates et l’expo. En anglais cette fois, une excellente explication concernant les RC Rates, Super Rates et l’Expo.
En 2 mots, la boucle PIDs qui tourne sur la FC a pour but de corriger en permanence les différences entre la consigne envoyée par la radiocommande (position des sticks) via le RX et la position réelle du multirotor. Les rates quand à eux permettent d’ajuster la courbe d’interprétation de ces sticks pour la rendre moins linéaire, par exemple : si l’on souhaite avoir des sticks moins sensibles dans la partie centrale et au contraire beaucoup plus agressifs sur les extrêmes.
Heureusement, il est assez facile de trouver des PIDs corrects réalisés par d’autres pilotes. Ci-dessous une capture de mes PIDs, et un lien vers le dump de ma config BetaFlight 3.4.1. Les PIDs par défaut sont souvent une base de départ potable et parfois tout à fait satisfaisante.

Pour voler en immersion, il faut un périphérique pour afficher le retour vidéo analogique du multirotor. Plusieurs solutions :
- Ecran (ça se passe d’explications)

- Masque : leur point fort, c’est leur prix, à partir de 30-40€. Un écran est placé au fond d’un masque et affiche la vidéo. De fait, ils sont relativement encombrants car l’écran doit avoir un certain recul par rapport aux yeux. Certains trouvent l’affichage un peu grand (on peut être amené à devoir bouger les yeux). C’est un bon moyen d’entrer dans le FPV dans de bonnes conditions à prix raisonnable. Le Eachine VR D2 Pro 5 (66€) semble un bon choix pour débuter. Il dispose d’un module diversity (2 antennes ==> meilleure réception) et d’un DVR intégré pour enregistrer le flux vidéo sur carte SD. Attention, si vous êtes porteur de lunettes, peu de masques sont adaptés. Edit : Néanmoins, un modèle qui s’adapte à toutes les lunettes et que je trouve excellent, c’est le FXT Viper V2.0. Très confortable, bonne qualité, écran bien reculé grâce à un ingénieux système de miroirs, DVR pratique etc.

- Lunettes : ici, nous avons un écran + lentille pour chaque œil. La sensation s’approche donc davantage de la réalité. C’est l’équipement de prédilection à haut niveau. Comme les écrans ont besoin de beaucoup moins de recul, elles sont moins encombrantes. En général, l’affichage est plus petit que dans un masque, là c’est une affaire de goûts. La contre-partie de cet encombrement réduit, on s’en doute, c’est le prix ! Pour de bonnes lunettes, il faut compter entre 250 et 500€. Les principales marques : FatShark, Skyzone, Aomway… Eachine. Impossible de porter des lunettes de vue avec, mais elles proposent souvent des réglages pouvant compenser. Beaucoup de modèles permettent d’adapter des verres correcteurs adaptés à notre vue que l’on pourra commander chez Rho-Lens par exemple (edit : j’utilise ces lentilles avec mes EV200D et j’en suis ravi).

J’avais envie de commencer avec des lunettes, sans me ruiner. J’ai donc opté pour les lunettes low-cost EV100 de Eachine (80€). Je ne sais pas si ce choix est le bon car je n’ai pas encore de point de comparaison. L’affichage est vraiment petit, mais elles font le job pour démarrer (je passerai vite à un modèle au-dessus). Je suis légèrement hypermétrope et je n’ai pas eu de souci pour les adapter à ma vue.
A noter que Eachine vient de sortir un nouveau modèle (EV200D), qui sur le papier promet des miracles pour 260€ : 1280*720, FOV de 42°, 16:9/4:3, dual diversity, DVR…
Edit : depuis la rédaction de cette article, je suis passé sur un excellent masque FXT Viper V2.0 puis sur des lunettes EV200D pour des raisons d’encombrement. Je ne recommande donc pas du tout ces EV100 d’entrée de gamme, la taille de l’affichage est ridicule, j’avais été indulgent car je ne connaissais rien d’autre.
La radiocommande est prête, le multirotor aussi. Si ce n’est pas déjà fait, il faut les appairer (binding). J’en profite pour signaler une erreur dans la documentation du QX95 : ce n’est pas la LED bleue qui doit rester allumée, mais la verte !
Ma Taranis était une version européenne sur laquelle le protocole D8 était désactivé, heureusement, comme on l’a vu plus haut, on peut flasher son firmware et réactiver le D8.
Mais j’ai eu un autre souci : ma radiocommande était par défaut en version 2.1.6, version dont le bootloader est buggé, empêchant le flashage du firmware. Heureusement, le problème est connu et une solution est documentée.
Pfffiouuu ! Bon, ça fait beaucoup d’informations à intégrer, mais au bout du compte, le jeu en vaut la chandelle, la preuve ! 🙂
La qualité n’est pas dingue, mais c’est un nano, donc pas de place pour une caméra numérique HD. L’enregistrement a été fait à partir des lunettes (pas de DVR embarqué), les interférences sont donc présentes, mais ça a le mérite de montrer plus ou moins ce que je vois dans les lunettes.
11. Passage à la taille au-dessus !
Nous voilà prêts à passer sur un vrai quad ! (parce que oui, j’ai accroché 😉 ).
Deux possibilités s’offrent à nous : construire son propre quad ou en acheter un. Choisir la seconde option ne vous dispensera pas de comprendre comment le démonter, car de toute façon, il faudra le réparer un jour ou l’autre, ou bien le faire évoluer.
Si la construction de votre propre quad vous intéresse : j’ai essayé d’aborder tout le process en agrégeant un maximum d’informations dans l’article suivant : Concevoir son drone : du choix des composants au premier vol.
De nombreux autres guides en ligne sont disponibles décrivant la construction d’un multirotor, voici quelques liens :
- Monter son drone racer FPV pour 160€ de A à Z (suite de vidéos)
- Fabriquer un drone de course FPV à moins de 200€
- TUTO : construire un racer en moins de 20 minutes
- Drone FPV Racing : Le Guide Complet
- Fabriquer un drone racer, les pièces nécessaires
- MONTER SON DRONE DE COURSE (c’est un peu léger…)
- Faire son propre drone DIY
Pour finir, voici quelques sites francophones très intéressants ! (liste absolument pas exhaustive) :
Bonsoir Jérôme,
J’ai jeté un œil intéressé à ton didacticiel. Comme toujours, c’est très logiquement construit, très clair, ultra documenté et bien écrit … Bravo !
Je vois qu’il s’agit d’une activité captivante pour vous autres technophiles.
C’est aussi la possibilité de sensations formidables sans en passer par un avion de chasse !
Je me demande toutefois s’il ne faut pas prendre garde à ne pas perturber les automatismes de l’équilibre (relations œils/oreilles/cerveau). J’imagine qu’une pratique trop longue ou trop fréquente expose à des perturbations fâcheuses.
J’ai parlé de ton travail à Ernesto qui est très intéressé car il a failli acheter un tel appareil qu’il imagine utiliser en fin d’année en Bolivie. Il a toujours le projet d’investir et va apprécier ton aide.
Encore bravo et on espère une démonstration prochaine.
Bise.