Après cette parenthèse culinaire, revenons à la technique. Dans un précédent article , je présentais l’étage des batteries du robot, passons à l’étage de gestion de l’alimentation.
Ce bloc va être chargé d’apporter l’énergie aux différents éléments du robots :
- 5V pour l’électronique de bas niveau et pour le cerveau (mini PC)
- 7.2V pour les moteurs à courant continu
- 6V pour les servomoteurs
J’utilise 3 modules :
- Pour l’électronique, l’alimentation DFRobot DFR0205 3.3-25V 25W convertira les 7.2V de la première batterie (ou de l’alimention externe) en 5V
- Les moteurs seront alimentés par la seconde batterie et pilotés par le contrôleur SaberTooth 2x5A.
- Pour les servomoteurs, le module d’alimentation Seeed Studio 1.25-35V 3A convertira les 7.2V de la première batterie (ou de l’alimention externe) en 6V
Lorsque que le robot sera alimenté en 12V (alim externe), il faudra le détecter parce que les moteurs ne pourront pas encaisser les 12V en continu (ou prévoir une alim externe de 9V) :
These motors are intended for use at 6 V. In general, these kinds of motors can run at voltages above and below this nominal voltage, so they should comfortably operate in the 3 – 9 V range, though they can begin rotating at voltages as low as 1 V. Higher voltages could start negatively affecting the life of the motor.
Voici le caisson prévu pour ces éléments :
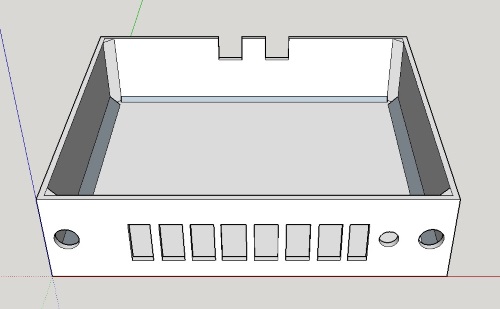

Les 2 trous sur les extérieurs accueilleront les fiches d’entrée pour les alimentations (électronique/moteurs). Le petit trou accueillera un double switch (pour activer/désactiver les 2 sources de courant en même temps).
Comme cet étage sera « suspendu » dans le châssis par des fixations latérales, j’ai collé 2 plaques d’aluminium sur les côtés pour renforcer la structure et éviter un décollage des couches de plastiques.
La grande ouverture rectangulaire est destinée au connecteur 14 pins qui permettra la connexion avec le corps du robot.
De gauche à droite, la description de chaque pin :
- +5V électronique bas niveau
- 0V
- +5V électronique haut niveau (mini PC, hub USB)
- 0V
- +6V pour les servomoteurs
- 0V
- Néant
- Pont diviseur de tension sur batterie 1 (surveillance de la charge et détection alim externe)
- Pont diviseur de tension sur batterie 2 (surveillance de la charge et détection alim externe)
- Pilotage des moteurs (connexion série Arduino Mega –> SaberTooth)
- Encodeur A moteur 1 vers Arduino Mega
- Encodeur B moteur 1 vers Arduino Mega
- Encodeur A moteur 2 vers Arduino Mega
- Encodeur B moteur 2 vers Arduino Mega
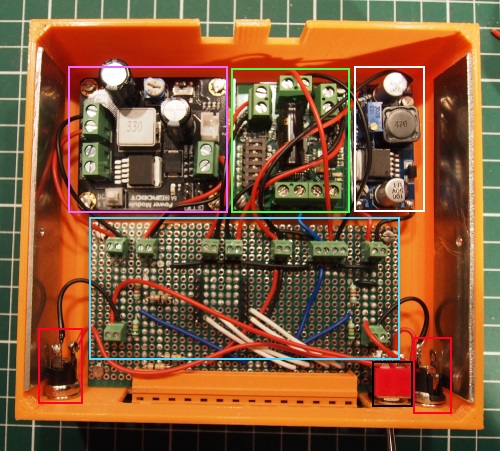
La photo ci-dessous montre l’agencement des composants :
- Rose : régulateur 5V
- Vert : contrôleur des moteurs
- Blanc : régulateur 6V
- Bleu : carte d’interface entre les différents éléments
- Rouge : fiches jack d’entrée pour l’alimentation en provenance des batteries/alim externe
- Noir : double switch
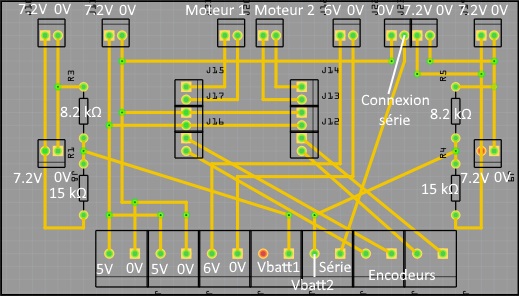
Le schéma ci-dessous permet de mieux visualiser les connexions :
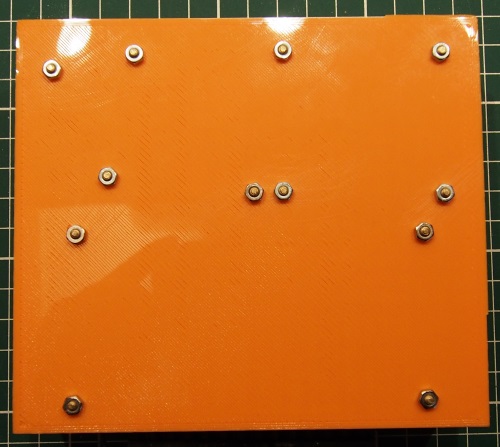
Vue du dessous : les composants sont fixés sur des entretoises.