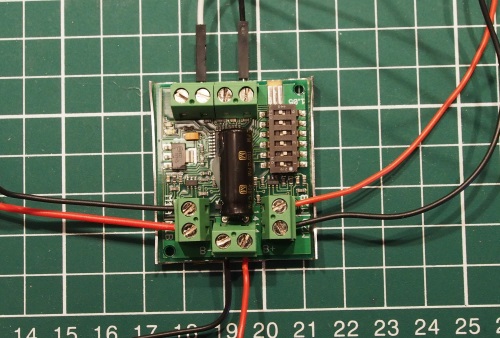
Pour piloter les moteurs du châssis IronMan-4, j’ai commandé un contrôleur de moteurs de chez Dimension Engineering, le « Sabertooth dual 5A motor driver« .
 Je l’ai commandé chez RobotShop, mais il est aussi disponible chez Gotronic.
Je l’ai commandé chez RobotShop, mais il est aussi disponible chez Gotronic.
Il permet de piloter 2 moteurs à courant continu de 6 à 18V et peut délivrer jusqu’à 5A par moteur. Je compte utiliser une batterie type modélisme de 7.2V, les specs sont donc parfaites pour le châssis et la source d’énergie.
Je ne vais pas reprendre la fiche produit ici, mais ce petit module offre quelques fonctions bien sympa, notamment au niveau de la consommation d’énergie (au freinage, à l’inversion du sens, récupération d’énergie cinétique…). Il propose aussi plusieurs modes de fonctionnement. Le mode série standard me permet de contrôler très facilement le moteur avec un seul pin de l’Arduino !
La transition de la vitesse maximale en avant à la vitesse maximale en arrière se fait sans prendre de précaution particulière (pas besoin d’arrêter les moteurs). Le contrôleur peut assurer que la transition soit fluide en toutes circonstances.
Voici le montage pour le test :
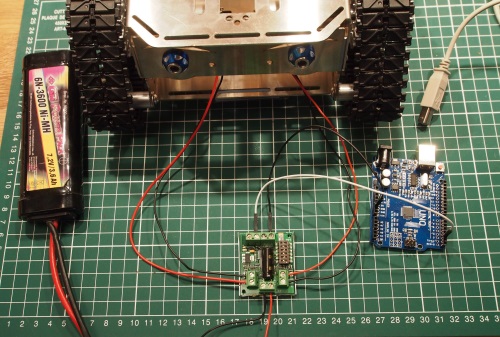
Le code pour le test est dispo ici.
Et la démo live (pour info, sans charge et les 2 moteurs à vitesse maximale, le courant mesuré est de 500 mA):