Après une petite trêve, il est temps de se remettre au boulot : réalisation d’un système Ambilight maison. Philips intègre cette technologie à certains de ses écrans depuis plusieurs années. Le principe est de diffuser un halo lumineux autour de la télé, en fonction des couleurs affichées sur les bords, pour une meilleure immersion.
Je voudrais intégrer un système similaire, mais pour mon PC et aller plus loin : en profiter pour les films, mais aussi les jeux, la musique, pouvoir définir des ambiances, gérer des notifications etc.
Il y a une ou deux semaines, j’ai trouvé ça dans ma boite aux lettres :
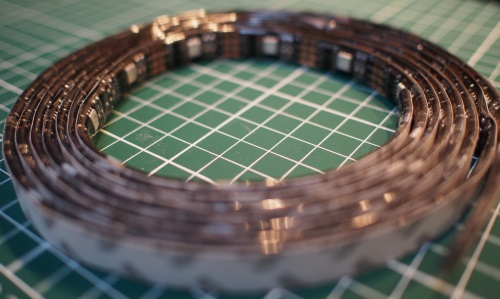
C’est l’élément clé : il s’agit d’un ruban de LEDs adressables. Comparés aux rubans de LEDs classique, l’avantage énorme de ces rubans, est qu’ils ne nécessitent que 3 ou 4 fils pour être contrôlés, grâce à des petits contrôleurs embarqués (chaque LEDs ayant une adresse). Il en existe différents types, j’ai opté (peut-être un peu rapidement) pour un modèle basé sur chipset SPI : WS2801. Ce n’est pas trop cher (15€ le mètre) et ça devrait faire l’affaire.
Le chipset de LEDs qui a le vent en poupe en ce moment semble être le WS2811 (ou 2812 / 2812B / Neopixel). Il s’agit d’un chipset 3 câbles, contrairement au SPI.
La chose importante à s’assurer lors du choix du chipset, est qu’il soit géré par la librairie FastLED pour Arduino. La liste des chispsets supportés est disponible sur le Wiki du projet.
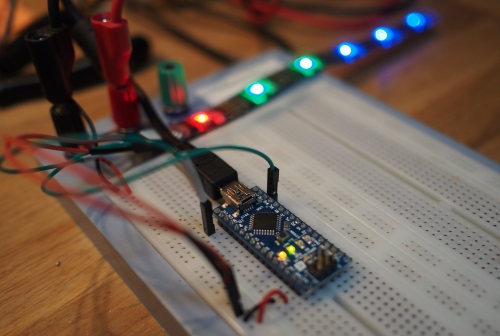
Mon ruban sera donc piloté par un Arduino Nano. Parce que j’en avais un qui traînait, que ça ne coûte pas cher (2-3€) et que ça ne prend pas trop de place 🙂
Pour le WS2801, nous aurons besoin de 4 cables : +5V (IN/OUT), 0V (GND), SPI Clock (CK) et SPI Data (SD).

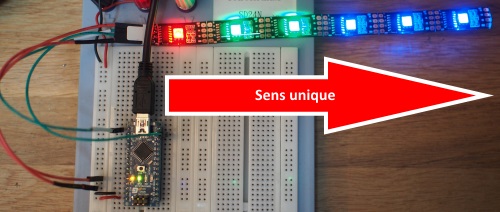
Remarque importante, qui m’a fait perdre un peu de temps : les rubans ne sont utilisables que dans un seul sens. Sur certains modèles, une flèche indique le sens. Ce n’était pas le cas sur le mien. J’aurais dû m’apercevoir plus tôt que d’un côté il était marqué « IN 5V » et de l’autre « OUT 5V » pour déterminer le sens.
La connexion sur le Arduino est très simple, il suffit d’utiliser les pins SPI CLOCK et SPI MOSI (pin digitaux 13 et 11 sur le Nano).
Après un premier loupé, j’ai fini par souder un connecteur sur mon ruban de LEDs pour avoir quelque chose de propre, solide et facilement raccordable à la platine de tests.
Pour mes premiers tests, j’ai travaillé avec un ruban de 6 LEDs. Ce n’est pas obligatoire, mais pratique pour la phase de calibrage. De plus, cela évite les problèmes liés à une alimentation insuffisante.
Après cette première partie concernant le matériel utilisé, passons au logiciel et au calibrage. Tout d’abord, il faudra se procurer la libraire FastLED (hyper optimisée et très complète).
Je copie/coller une remarque importante issue du site de FastLED :
IMPORTANT NOTE: If you are building for AVR based systems, please do not use any version of the arduino IDE 1.5.7 or later yet. It messes with some of the asm output which will cause you problems.
En clair, pour Arduino, s’assurer de ne pas avoir une version trop récente de l’IDE (j’utilise la 1.0.5-r2).
Une fois FastLED installé dans les librairies de l’IDE Arduino, nous pouvons ouvrir l’exemple « RGBCalibrate ».
Indiquer le nombre de LEDs utilisées :
#define NUM_LEDS 6
Modifier les pins utilisés :
#define DATA_PIN 11
#define CLOCK_PIN 13
Ajouter les LEDS qui correspondent au chipset utilisé (WS2801 dans mon cas) :
FastLED.addLeds<WS2801, DATA_PIN, CLOCK_PIN, RGB>(leds, NUM_LEDS);
Le code est prêt à être chargé, et testé ! Normalement, les LEDs devraient s’allumer. Si on constate de que la première LED est rouge, les 2 suivantes vertes et les 3 dernières bleues, alors tout est bon, les couleurs sont envoyées dans le bon ordre : Rouge, Vert, Bleu. Si ce n’est pas le cas, il faudra modifier la ligne d’ajout des LEDs pour identifier l’ordre des couleurs à utiliser pour votre ruban. Dans mon cas, RGB ne correspondait pas, je suis passé en BGR, en modifiant la ligne (ne pas hésiter à tester toutes les combinaisons jusqu’à tomber sur la bonne) :
FastLED.addLeds<WS2801, DATA_PIN, CLOCK_PIN, BGR>(leds, NUM_LEDS);
L’étape suivante a consisté à tester la communication entre le PC et la carte Arduino pour piloter le ruban. J’ai écrit 2 petits programmes:
- un pour le Arduino Nano, qui écoute les ordres du PC et contrôle les LEDs en fonctions des messages reçus
- un pour le PC (en .NET C#), qui permet d’envoyer des ordres au Arduino pour piloter les LEDs.
Le programme pour le Arduino Nano est dispo ici. Le principe est très simple : on écoute sur le port série. Si des données arrivent, on lit le premier octet, qui contiendra un caractère. Si ce caractère est un A, alors on lit les octets qui suivent (3 octets pour chaque led, correspondant au code couleur RGB). Si le premier octet est un B, C ou D, on passe en mode « amibiance » (le Arduino génère en boucle une animation pour les leds).
Côté PC, il s’agit d’un petit programme écrit en C# (application WPF). Les sources sont dispos ici. Attention, c’est pas un chef d’oeuvre, juste une bricole de test, pas de MVVM etc. Mais ça reste simple.
Rien de particulier à ajouter, si ce n’est que la communication avec le Arduino se fait grâce à la classe System.IO.Ports.SerialPort du Framework .NET et le composant graphique ColorPicker provient du Extended WPF Toolkit.
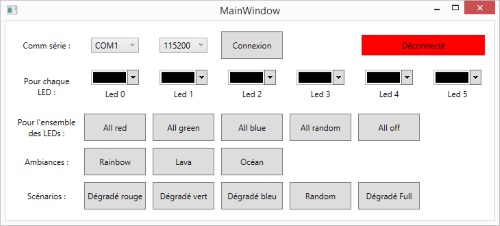
Toutes les actions depuis cette fenêtre, à part les « Ambiances », envoient explicitement à l’Arduino l’état RGB de chaque LED. L’Arduino ne servant qu’à les faire suivre aux LEDs. Ainsi, les scénarios sont intégralement pilotés par le PC, contrairement aux ambiances qui sont calculées par l’Arduino.
Voici une vidéo qui illustre le fonctionnement de l’ensemble :