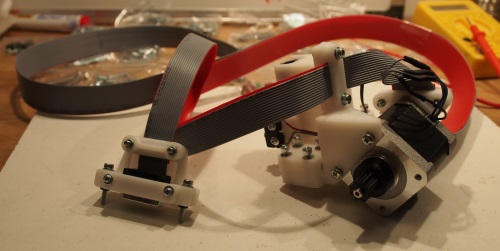
Toutes mes commandes sont enfin arrivées. En fait, il ne me manque que les planches de MDF, alors que c’est à peu près la seule chose que je n’ai pas commandée en Angleterre ou en Chine 😉
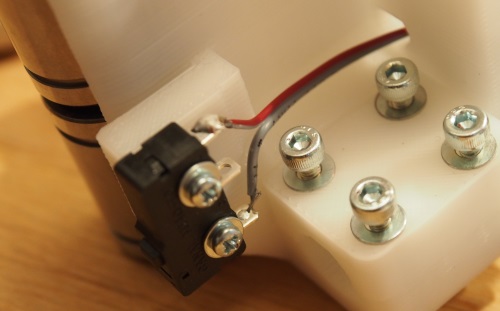
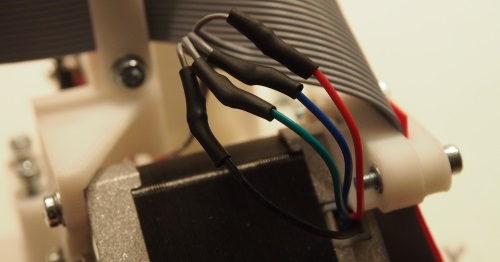
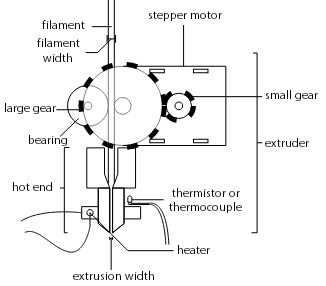
La carte contrôleur permet de piloter l’imprimante. Elle est connectée aux moteurs, plateau chauffant, au chauffage de la buse, aux thermistances, aux interrupteurs de fin de course etc. C’est elle qui est responsable de l’impression.
Bref j’ai reçu la carte électronique de contrôle aujourd’hui, une Melzi. J’ai pas mal hésité entre la config la plus répandue, à savoir un Arduino Mega + shield RAMPS 1.4 et la Melzi.

J’ai opté pour la Melzi essentiellement pour 2 raisons : la première, c’est que c’est la carte que Nophead propose par défaut dans son kit, donc pas besoin de modifier le gabarit de perçage. La seconde, c’est que la Melzi utilise des borniers à vis pour tous les câbles, ça me semble beaucoup plus fiable que les connecteurs habituels qui n’ont pas de réel blocage mécanique.
La Melzi est vraiment un « tout en un », les pilotes des moteurs sont pré-soudés (A4988), les connecteurs sont bien disposés etc. Mais il faut savoir que la solution basée sur un shield RAMPS étant plus répandue représente souvent le standard. Il sera plus facile de la faire évoluer (piloter plusieurs buses, ajouter un écran de contrôle etc.). Des évolutions sont aussi possibles sur la Melzi, mais au prix d’efforts/recherches plus importants.
Cette commande faisait partie des quelques une passées sur Aliexpress, donc j’ai voulu la tester rapidement (et sommairement), c’est à dire charger le Firmware Marlin modifié par Nophead pour m’assurer que cette première phase se passait bien.
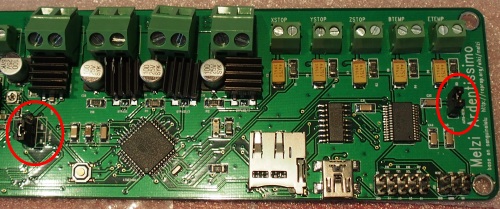
Avant toute chose, s’assurer que le cavalier de l’auto-reset est bien inséré (à droite sur l’image ci-dessous), et que le cavalier indiquant le mode d’alimentation de la carte est bien sur USB (pas besoin de s’embêter davantage, il s’agit seulement de charger le firmware) (à gauche sur la photo ci-dessous).
Ensuite, récupérer la version modifiée par Nophead du Firmware Marlin, dispo sur son Github. Le répertoire Melzi est à copier dans le dossier « hardware » du répertoire d’installation de l’IDE Arduino. On ouvre après le fichier principal du projet (Marlin.ino).
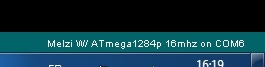
Il ne reste plus qu’à connecter la carte Melzi en USB, attendre que le driver s’installe et charger le firmware (s’assurer que le type de carte « Melzi W/ ATmega1284p 16mhz » et le bon port sont bien sélectionnés dans le menu « Outils »).
Le chargement s’est bien passé, ouf 🙂

Carté payée 37€ sur Aliexpress (les 4 drivers A4988 sont intégrés).